電流注入型感應電機矢量控制方案 - 基于SVPWM的感應電機控制仿真設計
2012年07月24日 16:48 來源:微計算機信息 作者:秩名 我要評論(0)
3 電流注入型感應電機矢量控制方案
3.1 電流注入型感應電機矢量控制系統
電流注入型矢量控制方案適用于中小功率、高開關頻率的矢量控制系統。此時控制系統的定子參考電壓完全可以由定子電流控制器提供,而無需考慮電機的定子電壓方程。逆變器開關頻率較高,而且電流控制器魯棒性足夠強,控制系統可以實現快速的定子電流控制,其實現方案如圖3 所示。同時,這種控制技術采用空間矢量PWM 技術輸出參考電壓,所以它能獲得很好的電流頻譜。
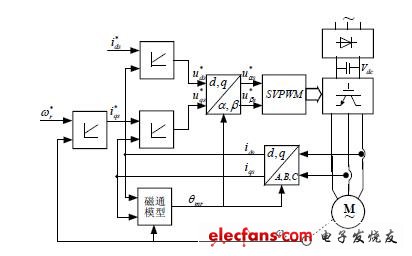
圖3 間接轉子磁場定向電流注入型感應電機矢量控制方案
由于電機是星形接法,無零序電流分量,所以該控制系統只需要測量電機的兩相電流,第三相電流可以通過方程iCs=-iAs-iBs 求出。此外,控制系統還需要測量電機的轉速,用于實現轉速閉環控制和計算轉子磁鏈位置角。控制系統總共包含轉速控制器、勵磁電流控制器和轉矩電流控制器等三個控制器,通常情況下,這三個控制器可以是PID 控制器。
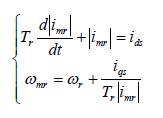
轉子磁場定向坐標系下的磁通模型如下式所示,可以看出,電機的勵磁電流分量imr 只與定子電流d 軸分量ids 有關,而不受定子電流q 軸分量iqs 的影響,說明在轉子磁場定向坐標系下,感應電機的勵磁電流分量和轉矩電流分量是完全解耦的。
3.2 間接轉子磁場定向電流注入型感應電機矢量控制系統仿真
利用MATLAB/SIMULINK 對本文提出的SVPWM 實現方案及間接轉子磁場定向電流注入型矢量控制系統進行仿真實驗,仿真時異步電動機參數為:額定功率Pe=4kW,額定電壓Ue=380V,極對數np=3,額定轉速ne=960r/min ,定子電阻Rs=3.21.,轉子電阻Rr=3.5219.,定子自感Ls=649.4mH ,轉子自感 Lr=“649”.4mH ,定轉子互感 Lm=“622”.2mH, 轉動慣量 J=“0”.12kgm2 。系統仿真模型參照圖3 而建立。該模型中包含有三個電流控制器、一臺感應電動機、電機變量測量模塊、磁通模型、坐標變換模塊和功率變換器模塊(SVPWM 產生和逆變器模塊封裝在一起)等等。
系統仿真結果如圖4 所示。圖4(a)所示是系統在額定負載條件下的轉速階躍響應波形。在t=1s 時刻前,系統處于靜止勵磁階段,以建立額定轉子磁通,如圖4(b)所示。T=1s 時刻,系統轉速給定由0 階躍為80 rad/s ,該矢量控制系統的轉速調節器迅速飽和,電機轉速在最大轉矩作用下以恒定加速度接近給定值,并在0.5s 內到達穩態,而且基本上沒有穩態誤差和超調。圖4(c)所示為控制系統的轉矩電流分量。圖4(d)為定子電流A 相的電流波形。從仿真結果可以看出,該矢量控制系統的轉速階躍響應既沒有超調,也沒有穩態誤差,而且在整個動態過程中,轉子勵磁電流分量基本保持不變,說明在負載擾動過程中矢量控制系統都能保持電機勵磁電流分量和轉矩電流分量的解耦控制,并具有良好的快速性。
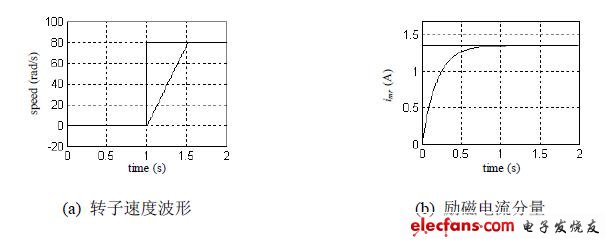
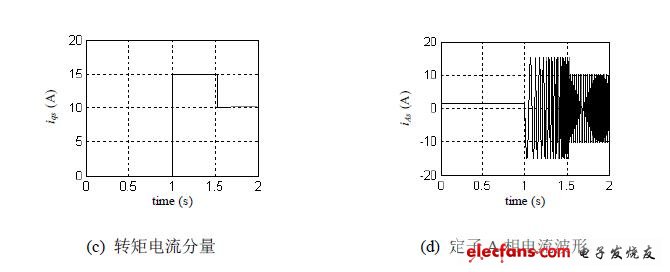
圖4 仿真實驗結果
4 結語
本文采用基于SVPWM 的控制技術,應用MATLAB/SIMULINK 仿真軟件,建立了感應電機SVPWM 控制系統仿真模型,仿真結果表明,系統具有很好的魯棒性和快速性,這種控制技術可以實現感應電機產生轉矩的電流分量和產生磁通的電流分量之間的解耦控制,使感應電機獲得與他勵直流電機一致的瞬態響應特性,實現對負載擾動和參考值變化的快速響應。本文建立的模型為進一步研究變頻調速系統提供了基礎模型,其使用的靈活性,操作的簡單性以及仿真的準確性為進行感應電機矢量控制系統的DSP 數字化設計打下了良好的基礎。
本文作者創新點:提出了一種基于MATLAB/SIMULINK 空間矢量脈寬調制技術實現方式,建立了間接轉子磁場定向電流注入型矢量控制系統仿真模型,仿真結果表明不但模型是正確的,而且系統具有良好的魯棒性和快速性,為下一步該系統的DSP 數字化設計打下基礎。
本文導航
- 第 1 頁:基于SVPWM的感應電機控制仿真設計
- 第 2 頁:電流注入型感應電機矢量控制方案