電子發(fā)燒友網(wǎng)報(bào)道(文/李彎彎)深度學(xué)習(xí)框架是一種底層開發(fā)工具,是集深度學(xué)習(xí)核心訓(xùn)練和推理框架、基礎(chǔ)模型庫、端到端開發(fā)套件、豐富的工具組件于一體的平臺(tái)。 ? 有了深度學(xué)習(xí)框架,工程師在工作時(shí)調(diào)
2022-06-07 00:01:00 3415
3415 相機(jī)標(biāo)定中所要確定的幾何模型參數(shù)分為內(nèi)參和外參兩種類型。相機(jī)內(nèi)參的作用是確定相機(jī)從三維空間到二維圖像的投影關(guān)系。相機(jī)外參的作用是確定相機(jī)坐標(biāo)與世界坐標(biāo)系之間相對(duì)位置關(guān)系。
2022-10-12 16:04:182247 單目相機(jī)標(biāo)定技術(shù)適用于被測(cè)表面曲率較小且需要獲取實(shí)際數(shù)據(jù)的應(yīng)用場(chǎng)合,比如食品、機(jī)械制造以及半導(dǎo)體等。
2023-07-21 11:32:272363 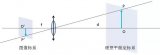
摘要:自然語言理解和機(jī)器翻譯被認(rèn)為是人工智能的核心難題之一,那么什么是自然語言理解?其研究現(xiàn)狀、挑戰(zhàn)和未來的發(fā)展方向是什么?近兩三年來,深度學(xué)習(xí)技術(shù)使很多人工智能問題的準(zhǔn)確率得到顯著提升,那么深度學(xué)習(xí)
2017-03-22 17:16:00
降落任務(wù)1.DQN/Double DQN/Dueling DQN2.PER高頻問題:1.深度強(qiáng)化學(xué)習(xí)網(wǎng)絡(luò)訓(xùn)練穩(wěn)定性 2.探索與利用關(guān)鍵點(diǎn):1.經(jīng)驗(yàn)回放技術(shù)的實(shí)現(xiàn)2.目標(biāo)網(wǎng)絡(luò)更新實(shí)操解析與訓(xùn)練四實(shí)驗(yàn)
2022-04-21 14:57:39
一:深度學(xué)習(xí)DeepLearning實(shí)戰(zhàn)時(shí)間地點(diǎn):1 月 15日— 1 月18 日二:深度強(qiáng)化學(xué)習(xí)核心技術(shù)實(shí)戰(zhàn)時(shí)間地點(diǎn): 1 月 27 日— 1 月30 日(第一天報(bào)到 授課三天;提前環(huán)境部署 電腦
2021-01-09 17:01:54
汽車安全系統(tǒng)的發(fā)展進(jìn)步中發(fā)揮重要的作用。而這些系統(tǒng)遠(yuǎn)不止僅供典型消費(fèi)者群體掌握和使用。深度學(xué)習(xí)這一概念在幾十年前就已提出,但如今它與特定的應(yīng)用程序、技術(shù)以及通用計(jì)算平臺(tái)上的可用性能更密切相關(guān)。深度學(xué)習(xí)
2022-11-11 07:55:50
安全系統(tǒng)的發(fā)展進(jìn)步中發(fā)揮重要的作用。而這些系統(tǒng)遠(yuǎn)不止僅供典型消費(fèi)者群體掌握和使用。深度學(xué)習(xí)這一概念在幾十年前就已提出,但如今它與特定的應(yīng)用程序、技術(shù)以及通用計(jì)算平臺(tái)上的可用性能更密切相關(guān)。深度學(xué)習(xí)
2019-03-13 06:45:03
深度學(xué)習(xí)常用模型有哪些?深度學(xué)習(xí)常用軟件工具及平臺(tái)有哪些?深度學(xué)習(xí)存在哪些問題?
2021-10-14 08:20:47
CPU優(yōu)化深度學(xué)習(xí)框架和函數(shù)庫機(jī)器學(xué)***器
2021-02-22 06:01:02
具有深度學(xué)習(xí)模型的嵌入式系統(tǒng)應(yīng)用程序帶來了巨大的好處。深度學(xué)習(xí)嵌入式系統(tǒng)已經(jīng)改變了各個(gè)行業(yè)的企業(yè)和組織。深度學(xué)習(xí)模型可以幫助實(shí)現(xiàn)工業(yè)流程自動(dòng)化,進(jìn)行實(shí)時(shí)分析以做出決策,甚至可以預(yù)測(cè)預(yù)警。這些AI
2021-10-27 06:34:15
深度學(xué)習(xí)應(yīng)用在測(cè)量與測(cè)繪技術(shù)
2019-05-16 17:21:50
一:深度學(xué)習(xí)DeepLearning實(shí)戰(zhàn)時(shí)間地點(diǎn):1 月 15日— 1 月18 日二:深度強(qiáng)化學(xué)習(xí)核心技術(shù)實(shí)戰(zhàn)時(shí)間地點(diǎn): 1 月 27 日— 1 月30 日(第一天報(bào)到 授課三天;提前環(huán)境部署 電腦
2021-01-10 13:42:26
幾篇張正友標(biāo)定方法的英文原文,不少朋友看過張正友標(biāo)定方法,這里提供他的英文原文。喜歡看英文文獻(xiàn)的,以及愿意更深入理解matlab中相機(jī)標(biāo)定工具箱的朋友可以參考。
2018-05-04 14:43:25
這里相機(jī)標(biāo)定主要內(nèi)容包括:圖像的采集、相機(jī)參數(shù)獲取、TOOLBOX_calib可視化描述一、相機(jī)標(biāo)定感謝博主的代碼分享,這里主要參考了一些(https://download.csdn.net
2021-08-18 07:24:03
MATLAB機(jī)器學(xué)習(xí)與深度學(xué)習(xí)核心技術(shù)應(yīng)用培訓(xùn)班備十余年MATLAB編程開發(fā)經(jīng)驗(yàn),機(jī)器學(xué)習(xí)、深度學(xué)習(xí)領(lǐng)域 一線實(shí)戰(zhàn)專家主講。培訓(xùn)時(shí)間:11月09日-11月12日培訓(xùn)地點(diǎn):北京理工大學(xué)(中關(guān)村
2018-10-23 16:51:05
``【課程推薦】龍哥手把手教你學(xué)LabVIEW機(jī)器視覺設(shè)計(jì)教程請(qǐng)問哪位大神有Labview機(jī)器視覺相機(jī)標(biāo)定的程序文件,麻煩分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
學(xué)習(xí),也就是現(xiàn)在最流行的深度學(xué)習(xí)領(lǐng)域,關(guān)注論壇的朋友應(yīng)該看到了,開發(fā)板試用活動(dòng)中有【NanoPi K1 Plus試用】的申請(qǐng),介紹中NanopiK1plus的高大上優(yōu)點(diǎn)之一就是“可運(yùn)行深度學(xué)習(xí)算法的智能
2018-06-04 22:32:12
相機(jī)標(biāo)定不成功點(diǎn)擊下一步?jīng)]反應(yīng)
2015-04-16 12:58:59
labview標(biāo)定圖片不成功 點(diǎn)擊下一步?jīng)]反應(yīng)
2015-04-16 12:57:25
最近在做視覺,需要用labview做相機(jī)的標(biāo)定,通過空間轉(zhuǎn)換確定空間位置。視覺助手的標(biāo)定只能標(biāo)定內(nèi)參數(shù),沒有辦法做內(nèi)外參數(shù)的標(biāo)定,哪位大神給指導(dǎo)指導(dǎo)如何做一個(gè)標(biāo)準(zhǔn)的標(biāo)定程序。
2017-04-24 16:08:44
是左右相機(jī)拍攝同一塊圓形標(biāo)定板的圖像,并根據(jù)labview自帶的圓點(diǎn)標(biāo)定板圓點(diǎn)檢測(cè)函數(shù)得到圓點(diǎn)坐標(biāo)。下圖是加載圓點(diǎn)標(biāo)定板標(biāo)定結(jié)果后,加載一對(duì)圖像后,鼠標(biāo)移動(dòng)到左圖上顯示的距離信息。程序框圖分3部分
2021-09-27 16:52:18
主要內(nèi)容本文提出了一種不依賴于棋盤格等輔助標(biāo)定物體,實(shí)現(xiàn)像素級(jí)相機(jī)和激光雷達(dá)自動(dòng)標(biāo)定的方法。方法直接從點(diǎn)云中提取3D邊特征,一避免遮擋問題,并且使用了精確度更高的深度連續(xù)邊。文中首先指出:以下四種
2021-09-01 07:42:19
深度學(xué)習(xí)是什么意思
2020-11-11 06:58:03
上述分類之外,還被用于多項(xiàng)任務(wù)(下面顯示了四個(gè)示例)。在 FPGA 上進(jìn)行深度學(xué)習(xí)的好處我們已經(jīng)提到,許多服務(wù)和技術(shù)都使用深度學(xué)習(xí),而 GPU 大量用于這些計(jì)算。這是因?yàn)榫仃嚦朔ㄗ鳛?b class="flag-6" style="color: red">深度學(xué)習(xí)中的主要
2023-02-17 16:56:59
目標(biāo)平面與成像平面平行,但是攝像頭與目標(biāo)平面相對(duì)位置是改變的,那么:1,相機(jī)標(biāo)定后獲得的參數(shù)還能不能用,因?yàn)槲铱从械恼f相機(jī)標(biāo)定后的參數(shù)用于相機(jī)與工作平面的相對(duì)位置不變。所以不知道了2,如果參數(shù)不能
2016-05-20 15:49:27
NIST相機(jī)是由哪些部分組成的?NIST相機(jī)有什么作用?制造NIST相機(jī)面臨的主要挑戰(zhàn)是什么?如何去解決?
2021-07-09 06:58:12
——工業(yè)機(jī)器人的智能化程度要求也越來越高,采用深度學(xué)習(xí)技術(shù)為工業(yè)機(jī)器人賦能是目前各大廠商的統(tǒng)一認(rèn)知。本文結(jié)合實(shí)際案例,簡要說明一下智能機(jī)器人的實(shí)現(xiàn)流程。一、智能機(jī)器人概念 人工智能技術(shù),其主要作用就是用
2018-05-31 09:36:03
小白求助,求相機(jī)標(biāo)定示例
2021-11-22 07:43:41
:相機(jī)標(biāo)定和線結(jié)構(gòu)光標(biāo)定。目前相機(jī)標(biāo)定技術(shù)比較成熟,尤其是以張正友平面標(biāo)定法為代表的相機(jī)標(biāo)定方法,得到了廣泛的應(yīng)用和認(rèn)可。而線結(jié)構(gòu)光的標(biāo)定方法,目前也有一些標(biāo)定方法在實(shí)際中應(yīng)用。 接收器使用激光光源投射
2020-08-25 11:05:19
計(jì)算機(jī)視覺干貨資料,涉及相機(jī)標(biāo)定、三維重建、立體視覺、SLAM、深度學(xué)習(xí)、點(diǎn)云后處理、姿態(tài)估計(jì)、多視圖幾何、多傳感器融合等方向【計(jì)算...
2021-07-27 07:51:42
lidar_camera_calibration項(xiàng)目——激光雷達(dá)和相機(jī)聯(lián)合標(biāo)定
2019-04-12 09:27:38
怎樣從傳統(tǒng)機(jī)器學(xué)習(xí)方法過渡到深度學(xué)習(xí)?
2021-10-14 06:51:23
請(qǐng)問一下什么是深度學(xué)習(xí)?
2021-08-30 07:35:21
D130S型3D相機(jī)采用主動(dòng)式深度感知技術(shù),它采用激光光源和MEMS微振鏡模組作為投影模組,將可編碼的條形結(jié)構(gòu)光投射于物體之上,并由成像設(shè)備采集并傳輸給計(jì)算單元,生成點(diǎn)云圖像。即其原理為通過在成像
2022-01-29 13:40:52
D130型3D相機(jī)采用自主研發(fā)的MEMS結(jié)構(gòu)光技術(shù),結(jié)合紅外激光光束實(shí)現(xiàn)光柵動(dòng)態(tài)結(jié)構(gòu)光投射,通過高速CMOS拍攝條紋畸變,采用三角測(cè)距原理實(shí)現(xiàn)高精度三維信息采集。該型號(hào)3D相機(jī)在
2022-03-21 16:16:04
D132型3D相機(jī)采用自主研發(fā)的MEMS結(jié)構(gòu)光技術(shù),結(jié)合紅外激光光束實(shí)現(xiàn)光柵動(dòng)態(tài)結(jié)構(gòu)光投射,通過高速CMOS拍攝條紋畸變,采用三角測(cè)距原理實(shí)現(xiàn)高精度三維信息采集。該型號(hào)3D相機(jī)在
2022-06-15 14:44:13
光學(xué)標(biāo)定板應(yīng)用領(lǐng)域宏誠光學(xué)玻璃系列標(biāo)定板和陶瓷系列標(biāo)定板是專為高校實(shí)驗(yàn)、研究單位項(xiàng)目研發(fā)和機(jī)器視覺集成商產(chǎn)品標(biāo)定等等客戶群體使用的常用標(biāo)定工具,能夠方便獲得相機(jī)的標(biāo)定數(shù)據(jù)。標(biāo)定板作用:為校正鏡頭畸變
2022-09-20 08:14:32
matrox mil開發(fā)資料:CALIBRATION相機(jī)標(biāo)定模塊
2015-12-10 16:32:06 8
8 什么是攝相機(jī)標(biāo)定?攝相機(jī)標(biāo)定方法的分類?感興趣的小伙伴們可以瞧一瞧。
2016-09-22 12:04:450 我們首先介紹下計(jì)算機(jī)視覺領(lǐng)域中常見的三個(gè)坐標(biāo)系:圖像坐標(biāo)系,相機(jī)坐標(biāo)系,世界坐標(biāo)系。以及他們之間的關(guān)系。然后介紹如何使用張正友相機(jī)標(biāo)定法標(biāo)定相機(jī)。攝像機(jī)標(biāo)定(Camera calibration)簡單來說是從世界坐標(biāo)系換到圖像坐標(biāo)系的過程,也就是求最終的投影矩陣的過程。
2017-12-04 16:56:3517861 
OpenCV sample目錄下自帶兩個(gè)與相機(jī)標(biāo)定的cpp文件即:calibration.cpp和calibration_artificial.cppcalibration.cpp 是通過用戶輸入
2017-12-04 17:23:263428 
針對(duì)基于C形臂的手術(shù)導(dǎo)航系統(tǒng)中相機(jī)標(biāo)定這一關(guān)鍵技術(shù)中存在的過渡環(huán)節(jié)過多、參數(shù)求解過程復(fù)雜等問題,提出一種完全忽略相機(jī)模型的解決方法。該方法完全忽略相機(jī)模型,在映射參數(shù)求解過程中簡化了過渡環(huán)節(jié),使得
2017-12-14 15:31:305 針對(duì)張正友標(biāo)定方法中相機(jī)內(nèi)參數(shù)的求解可能陷入局部最優(yōu)解的問題,考慮鏡頭的三階徑向畸變和二階離心畸變,提出一種基于改進(jìn)遺傳算法的單目相機(jī)內(nèi)參數(shù)優(yōu)化標(biāo)定方案。該方法可顯著提高相機(jī)標(biāo)定中內(nèi)參數(shù)的精度,并能避免陷入局部最優(yōu)。最后,實(shí)驗(yàn)驗(yàn)證了所提方案的有效性和可行性。
2018-01-05 16:11:491 1月17日,院友袁進(jìn)輝博士回到微軟亞洲研究院做了題為《打造最強(qiáng)深度學(xué)習(xí)引擎》的報(bào)告,分享了深度學(xué)習(xí)框架方面的技術(shù)進(jìn)展。
2018-01-25 09:23:454492 
本質(zhì)上,深度學(xué)習(xí)提供了一套技術(shù)和算法,這些技術(shù)和算法可以幫助我們對(duì)深層神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)進(jìn)行參數(shù)化——人工神經(jīng)網(wǎng)絡(luò)中有很多隱含層數(shù)和參數(shù)。深度學(xué)習(xí)背后的一個(gè)關(guān)鍵思想是從給定的數(shù)據(jù)集中提取高層次的特征。因此,深度學(xué)習(xí)的目標(biāo)是克服單調(diào)乏味的特征工程任務(wù)的挑戰(zhàn),并幫助將傳統(tǒng)的神經(jīng)網(wǎng)絡(luò)進(jìn)行參數(shù)化。
2019-06-08 14:44:004142 
相機(jī)標(biāo)定可以說是計(jì)算機(jī)視覺/機(jī)器視覺的基礎(chǔ),但是初學(xué)者不易上手,本文將給讀者整理一遍相機(jī)標(biāo)定的邏輯,并在文末回答評(píng)論區(qū)提出的問題。分為以下內(nèi)容:
2019-06-01 09:54:153973 
Zebra 可消除深度學(xué)習(xí)推斷中具有挑戰(zhàn)性的編程及 FPGA 任務(wù)。Zebra 可輕松部署和適應(yīng)廣泛的神經(jīng)網(wǎng)絡(luò)及框架。
2019-07-21 10:59:09893 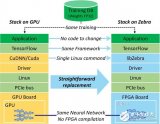
在過去的十年里,自動(dòng)駕駛汽車技術(shù)取得了越來越快的進(jìn)步,主要得益于深度學(xué)習(xí)和人工智能領(lǐng)域的進(jìn)步。作者就自動(dòng)駕駛中使用的深度學(xué)習(xí)技術(shù)的現(xiàn)狀以及基于人工智能的自驅(qū)動(dòng)結(jié)構(gòu)、卷積和遞歸神經(jīng)網(wǎng)絡(luò)、深度強(qiáng)化學(xué)習(xí)
2019-10-28 16:07:191831 
為了在精確測(cè)量中盡量消除誤差,標(biāo)定CCD相機(jī)在實(shí)際測(cè)量環(huán)境中的內(nèi)部參數(shù)有著重要的意義。
2020-03-21 11:58:0514 這種情況的標(biāo)定過程實(shí)際上和相機(jī)和機(jī)械手分離的標(biāo)定方法是一樣的,因?yàn)?b class="flag-6" style="color: red">相機(jī)拍照時(shí),機(jī)械手會(huì)運(yùn)動(dòng)到相機(jī)標(biāo)定的時(shí)候的位置,然后相機(jī)拍照,得到目標(biāo)的坐標(biāo),再控制機(jī)械手,所以簡單的相機(jī)固定在末端的手眼系統(tǒng)很多都是采用這種方法,標(biāo)定的過程和手眼分離系統(tǒng)的標(biāo)定是可以相同對(duì)待的。
2020-07-11 09:57:505357 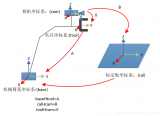
在實(shí)際控制中,相機(jī)檢測(cè)到目標(biāo)在圖像中的像素位置后,通過標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機(jī)的像素坐標(biāo)變換到機(jī)械手的空間坐標(biāo)系中,然后根據(jù)機(jī)械手坐標(biāo)系計(jì)算出各個(gè)電機(jī)該如何運(yùn)動(dòng),從而控制機(jī)械手到達(dá)指定位置。這個(gè)過程中涉及到了圖像標(biāo)定,圖像處理,運(yùn)動(dòng)學(xué)正逆解,手眼標(biāo)定等。
2020-08-28 11:42:4610856 
學(xué)習(xí)可以輕松地將兩個(gè)數(shù)字都識(shí)別為9。深度學(xué)習(xí)準(zhǔn)確地對(duì)不同對(duì)象進(jìn)行分類的能力可以解決自動(dòng)駕駛汽車面臨的一些主要挑戰(zhàn)。
2020-10-23 16:05:321291 轉(zhuǎn)自:微信公眾號(hào)AI圖像 創(chuàng)建標(biāo)定數(shù)據(jù)模型 你可以用算子create_calib_data創(chuàng)建一個(gè)標(biāo)定數(shù)據(jù)模型,指定相機(jī)和標(biāo)定物體的數(shù)量。當(dāng)用一個(gè)相機(jī)的時(shí)候,你也用一個(gè)單獨(dú)的標(biāo)定物體。 然后,你要做
2020-10-31 11:31:383434 
標(biāo)定板特征成像不能出現(xiàn)明顯的離焦距,出現(xiàn)離焦時(shí)可通過調(diào)整調(diào)整標(biāo)定板的距離、光圈的大小和像距(對(duì)于定焦鏡頭,通常說的調(diào)焦就是指調(diào)整像距)。
2020-11-01 11:26:413510 張正友相機(jī)標(biāo)定法是張正友教授1998年提出的單平面棋盤格的相機(jī)標(biāo)定方法。傳統(tǒng)標(biāo)定法的標(biāo)定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統(tǒng)標(biāo)定法和自標(biāo)定法之間,但克服了傳統(tǒng)標(biāo)定
2020-12-31 10:06:195420 
覺信息的理解可以被再現(xiàn)甚至超越。借助深度學(xué)習(xí),作為機(jī)器學(xué)習(xí)的一部分,可以在應(yīng)用實(shí)例的基礎(chǔ)上學(xué)習(xí)和訓(xùn)練復(fù)雜的關(guān)系。 機(jī)器學(xué)習(xí)中的另一種技術(shù)是例如“超級(jí)矢量機(jī)”。與深度學(xué)習(xí)相比,必須手動(dòng)定義和驗(yàn)證功能。在深度學(xué)習(xí)中
2021-03-12 16:11:007763 
相機(jī)標(biāo)定在計(jì)算機(jī)視覺領(lǐng)域中有著至關(guān)重要的作用。絕大多數(shù)相杋標(biāo)定方法假設(shè)相機(jī)為針孔模型,且需要良好聚焦的圖像來保證相機(jī)內(nèi)外參估計(jì)的準(zhǔn)確性。然而,這些條件會(huì)受到相機(jī)景深的影響。在薄透鏡相機(jī)模型假設(shè)
2021-04-21 15:05:5716 基于深度學(xué)習(xí)的道路表面裂縫檢測(cè)技術(shù)
2021-07-05 16:30:3073 為什么要進(jìn)行單相機(jī)標(biāo)定? 廣義:畸變矯正和一維和二維測(cè)量 畸變矯正: 在幾何光學(xué)和陰極射線管(CRT)顯示中。畸變是對(duì)直線投影的一種偏移。簡單來說直線投影是場(chǎng)景內(nèi)的一條直線投影到圖片上也保持為一條
2021-09-02 09:45:383084 在大多數(shù)條件下,這些參數(shù)必須通過實(shí)驗(yàn)與計(jì)算才能得到。無論是在圖像測(cè)量或者機(jī)器視覺應(yīng)用中,相機(jī)參數(shù)的標(biāo)定都是非常關(guān)鍵的環(huán)節(jié),其標(biāo)定結(jié)果的精度及算法的穩(wěn)定性直接影響相機(jī)工作產(chǎn)生結(jié)果的準(zhǔn)確性。
2022-06-21 11:12:347613 在實(shí)際控制中,相機(jī)檢測(cè)到目標(biāo)在圖像中的像素位置后,通過標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機(jī)的像素坐標(biāo)變換到機(jī)械手的空間坐標(biāo)系中,然后根據(jù)機(jī)械手坐標(biāo)系計(jì)算出各個(gè)電機(jī)該如何運(yùn)動(dòng),從而控制機(jī)械手到達(dá)指定位置。這個(gè)過程中涉及到了圖像標(biāo)定,圖像處理,運(yùn)動(dòng)學(xué)正逆解,手眼標(biāo)定等。
2022-08-18 15:54:375458 來自CMU Robotics Institute, 已知最早3D Laser與相機(jī)標(biāo)定的工作(2005年),基于matlab的圖形用戶界面,進(jìn)行激光雷達(dá)相機(jī)外參標(biāo)定。
2022-11-10 14:59:262577 張正友相機(jī)標(biāo)定法是張正友教授1998年提出的單平面棋盤格的相機(jī)標(biāo)定方法。傳統(tǒng)標(biāo)定法的標(biāo)定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統(tǒng)標(biāo)定法和自標(biāo)定法之間,但克服了傳統(tǒng)標(biāo)定
2022-11-14 10:14:402382 因?yàn)?b class="flag-6" style="color: red">相機(jī)成像的模型比較復(fù)雜,所以依賴于一張圖像來標(biāo)定相機(jī)是不可靠的。但是我們可以把世界坐標(biāo)固定在標(biāo)定板上,通過轉(zhuǎn)動(dòng)和平移標(biāo)定板來得到多幅不同的圖像。
2022-11-22 10:34:053073 鑒于科學(xué)的快速增長和發(fā)展,了解使用哪些人工智能技術(shù)來推進(jìn)項(xiàng)目可能具有挑戰(zhàn)性。本文概述了機(jī)器學(xué)習(xí)和深度學(xué)習(xí)之間的差異,以及如何確定何時(shí)應(yīng)用這兩種方法。
2022-11-30 14:22:00706 相機(jī)標(biāo)定可以歸納為P?n?P(Perspective-n-Point)的問題,即已知三維物點(diǎn)坐標(biāo)和對(duì)應(yīng)的二維投影坐標(biāo),求解相機(jī)參數(shù)。由于鏡頭的畸變(徑向和切向)帶來非線性成像模型,一般求解方法分為兩步:
2022-12-21 09:52:30859 在這里我們所說的雙目標(biāo)定是狹義的,講解理論的時(shí)候僅指兩臺(tái)相機(jī)之間相互位置的標(biāo)定,在代碼實(shí)踐的時(shí)候,我們才說完整的雙目標(biāo)定。
2022-12-28 17:17:241978 人工智能的概念在1956年就被提出,如今終于走入現(xiàn)實(shí),離不開一種名為“深度學(xué)習(xí)”的技術(shù)。深度學(xué)習(xí)的運(yùn)作模式,如同一場(chǎng)傳話游戲。給神經(jīng)網(wǎng)絡(luò)輸入數(shù)據(jù),對(duì)數(shù)據(jù)的特征進(jìn)行描述,在神經(jīng)網(wǎng)絡(luò)中層層傳遞,最終
2023-01-14 23:34:43588 
此方法采用一塊大標(biāo)定板來統(tǒng)一各個(gè)相機(jī)的坐標(biāo),每個(gè)大標(biāo)定板中有若干小標(biāo)定板,各個(gè)小標(biāo)定板間的位置關(guān)系都是已知的,各個(gè)相機(jī)都能拍攝到一個(gè)小標(biāo)定板。通過各個(gè)小標(biāo)定板可以標(biāo)定每個(gè)相機(jī)的內(nèi)部參數(shù)和外部參數(shù),每個(gè)相機(jī)的坐標(biāo)都可以轉(zhuǎn)換到各個(gè)小標(biāo)定板的坐標(biāo)系上,從而統(tǒng)一各個(gè)相機(jī)的坐標(biāo)。
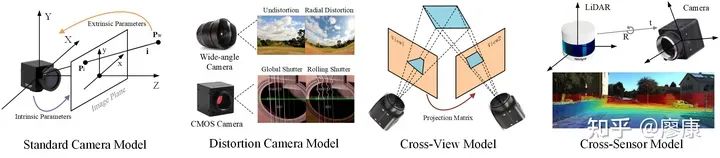
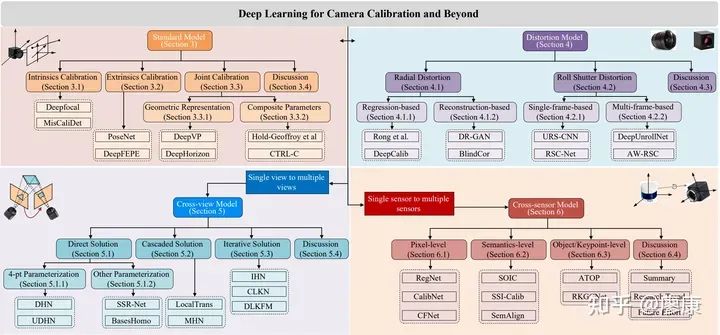
2023-03-13 10:06:371506 相機(jī)模型描述了從三維世界坐標(biāo)中的點(diǎn)到其在二維圖像平面上投影的成像過程。其中,不同的相機(jī)和傳感器系統(tǒng)對(duì)應(yīng)不同類型的參數(shù)模型。在本綜述中,我們首先回顧了標(biāo)準(zhǔn)的針孔相機(jī)模型涉及的內(nèi)外相機(jī)參數(shù)以及幾何表征。
2023-05-11 16:33:28409 
相機(jī)模型描述了從三維世界坐標(biāo)中的點(diǎn)到其在二維圖像平面上投影的成像過程。其中,不同的相機(jī)和傳感器系統(tǒng)對(duì)應(yīng)不同類型的參數(shù)模型。
2023-05-12 10:22:16186 
常見的消費(fèi)級(jí)RGB-D相機(jī)具有粗略的內(nèi)參和外參校準(zhǔn)數(shù)據(jù)的,通常無法滿足許多機(jī)器人應(yīng)用所需的精度要求。
2023-05-23 09:28:201000 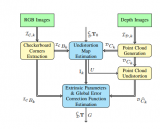
相機(jī)標(biāo)定是通過輸入帶有標(biāo)定patter的標(biāo)定板來獲得相機(jī)參數(shù)的一個(gè)過程。實(shí)際的光學(xué)成像是一套非常復(fù)雜的過程,從三維世界投影到相機(jī)中的二維圖像。相機(jī)標(biāo)定就是用抽象的數(shù)學(xué)模型來表示這個(gè)復(fù)雜的成像過程。
2023-06-01 14:36:46430 
智能汽車是指集成了各種先進(jìn)技術(shù)的智能化交通工具,它不僅具有駕駛輔助和自動(dòng)駕駛功能,還能實(shí)現(xiàn)智能聯(lián)網(wǎng)、智能感知和智能互動(dòng)等多種功能。而車載傳感器作為智能汽車的重要組成部分,其標(biāo)定技術(shù)也顯得尤為重要。本文將深度解讀智能汽車車載傳感器標(biāo)定技術(shù),包括標(biāo)定技術(shù)的定義、分類、意義及其實(shí)現(xiàn)方法等方面。
2023-06-02 10:56:531669 相機(jī)標(biāo)定是計(jì)算機(jī)視覺最基礎(chǔ)也是至關(guān)重要的一個(gè)問題,標(biāo)定的精度夠不夠決定了以后的校正、去畸變、配準(zhǔn)、計(jì)算三維坐標(biāo)、恢復(fù)三維模型能否進(jìn)一步做下去。
2023-06-26 09:51:30312 首先,課程介紹了雙目相機(jī)標(biāo)定的基礎(chǔ)知識(shí)。我了解到雙目相機(jī)是由兩個(gè)相機(jī)組成的系統(tǒng),通過同時(shí)拍攝目標(biāo)物體的兩個(gè)視角來獲取三維信息。
2023-07-03 14:25:061922 
在大多數(shù)條件下,這些參數(shù)必須通過實(shí)驗(yàn)與計(jì)算才能得到。無論是在圖像測(cè)量或者機(jī)器視覺應(yīng)用中,相機(jī)參數(shù)的標(biāo)定都是非常關(guān)鍵的環(huán)節(jié),其標(biāo)定結(jié)果的精度及算法的穩(wěn)定性直接影響相機(jī)工作產(chǎn)生結(jié)果的準(zhǔn)確性。
2023-08-03 09:38:04832 
張正友標(biāo)定方法是一種經(jīng)典的相機(jī)標(biāo)定方法,目前是最受歡迎的方法之一。該方法通過一種機(jī)器學(xué)習(xí)的方法,利用大量匹配的數(shù)據(jù)點(diǎn)像素坐標(biāo)、世界坐標(biāo),基于極大似然估計(jì)擬合得到一個(gè)最優(yōu)解。
2023-08-03 10:59:12641 
對(duì)于攝像機(jī)標(biāo)定問題已提出了很多方法,攝像機(jī)標(biāo)定的理論問題已得到較好的解決,對(duì)攝像機(jī)標(biāo)定的研究來說,當(dāng)前的研究工作應(yīng)該集中在如何針對(duì)具體的實(shí)際應(yīng)用問題,采用特定的簡便、實(shí)用、快速、準(zhǔn)確的標(biāo)定方法。
2023-08-04 12:54:171388 
深度學(xué)習(xí)算法簡介 深度學(xué)習(xí)算法是什么?深度學(xué)習(xí)算法有哪些?? 作為一種現(xiàn)代化、前沿化的技術(shù),深度學(xué)習(xí)已經(jīng)在很多領(lǐng)域得到了廣泛的應(yīng)用,其能夠不斷地從數(shù)據(jù)中提取最基本的特征,從而對(duì)大量的信息進(jìn)行機(jī)器學(xué)習(xí)
2023-08-17 16:02:566010 。 在深度學(xué)習(xí)中,使用了一些快速的算法,比如卷積神經(jīng)網(wǎng)絡(luò)以及深度神經(jīng)網(wǎng)絡(luò),這些算法在大量數(shù)據(jù)處理和圖像識(shí)別上面有著非常重要的作用。 深度學(xué)習(xí)領(lǐng)域的發(fā)展不僅僅是科技上的顛覆,更是對(duì)人類思維模式的挑戰(zhàn)。雖然深度學(xué)習(xí)
2023-08-17 16:03:041305 深度學(xué)習(xí)框架連接技術(shù) 深度學(xué)習(xí)框架是一個(gè)能夠幫助機(jī)器學(xué)習(xí)和人工智能開發(fā)人員輕松進(jìn)行模型訓(xùn)練、優(yōu)化及評(píng)估的軟件庫。深度學(xué)習(xí)框架連接技術(shù)則是需要使用深度學(xué)習(xí)模型的應(yīng)用程序必不可少的技術(shù),通過連接技術(shù)
2023-08-17 16:11:16443 深度學(xué)習(xí)框架和深度學(xué)習(xí)算法教程 深度學(xué)習(xí)是機(jī)器學(xué)習(xí)領(lǐng)域中的一個(gè)重要分支,多年來深度學(xué)習(xí)一直在各個(gè)領(lǐng)域的應(yīng)用中發(fā)揮著極其重要的作用,成為了人工智能技術(shù)的重要組成部分。許多深度學(xué)習(xí)算法和框架提供
2023-08-17 16:11:26638 計(jì)算機(jī)視覺中仍有許多具有挑戰(zhàn)性的問題需要解決。然而,深度學(xué)習(xí)方法正在針對(duì)某些特定問題取得最新成果。
在最基本的問題上,最有趣的不僅僅是深度學(xué)習(xí)模型的表現(xiàn);事實(shí)上,單個(gè)模型可以從圖像中學(xué)習(xí)意義并執(zhí)行視覺任務(wù),從而無需使用專門的手工制作方法。
2023-08-21 09:56:05306 
選中Export Camera Parameters按鈕,將計(jì)算得到的相關(guān)參數(shù)導(dǎo)入到Matlab中;若要進(jìn)行更精確的標(biāo)定,可在標(biāo)定時(shí)考慮畸變誤差或采用雙目相機(jī)標(biāo)定方法。
2023-10-09 10:51:50513 
的挑戰(zhàn)。 二、深度學(xué)習(xí)在語音識(shí)別中的應(yīng)用 1.基于深度神經(jīng)網(wǎng)絡(luò)的語音識(shí)別:深度神經(jīng)網(wǎng)絡(luò)(DNN)和循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)是深度學(xué)習(xí)在語音識(shí)別中應(yīng)用的主要技術(shù)。基于這些網(wǎng)絡(luò)的語音識(shí)別系統(tǒng)能夠有效地提高識(shí)別精度和效率,并且被廣
2023-10-10 18:14:53449 這個(gè)逼近的過程就是「相機(jī)標(biāo)定」,我們用簡單的數(shù)學(xué)模型來表達(dá)復(fù)雜的成像過程,并且求出成像的反過程。標(biāo)定之后的相機(jī),可以進(jìn)行三維場(chǎng)景的重建,即深度的感知,這是計(jì)算機(jī)視覺的一大分支。
2023-10-18 17:00:07476 
如今,AI技術(shù)的廣泛應(yīng)用已經(jīng)成為推動(dòng)制造和物流領(lǐng)域自動(dòng)化的核心驅(qū)動(dòng)力。康耐視所推出的深度學(xué)習(xí)和邊緣學(xué)習(xí)技術(shù),這兩種基于AI的技術(shù),在工業(yè)自動(dòng)化領(lǐng)域有著廣泛的應(yīng)用前景。然而,由于這兩種技術(shù)在研發(fā)
2023-11-17 10:44:29242 在選擇標(biāo)定板時(shí),一個(gè)重要的考慮因素是它的物理尺寸。這最終關(guān)系到最終應(yīng)用的測(cè)量視場(chǎng)(FOV)。這是因?yàn)?b class="flag-6" style="color: red">相機(jī)需要聚焦在特定的距離上標(biāo)定。改變焦距長度會(huì)輕微地影響對(duì)焦距離,這會(huì)影響之前的標(biāo)定。即使是光圈的改變通常也會(huì)對(duì)標(biāo)定的有效性產(chǎn)生負(fù)面影響,這就是為什么要避免改動(dòng)它們。
2023-11-25 14:36:08415 
包含了計(jì)算相機(jī)內(nèi)參,獲得標(biāo)定數(shù)據(jù),優(yōu)化計(jì)算外參和雷達(dá)相機(jī)融合應(yīng)用相關(guān)的代碼。 本方案中使用了標(biāo)定板角點(diǎn)作為標(biāo)定目標(biāo)物,由于Livox雷達(dá)非重復(fù)性掃描的特點(diǎn),點(diǎn)云的密度較大,比較易于找到雷達(dá)點(diǎn)云中
2023-11-28 11:09:12210 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論