 電子發燒友App
電子發燒友App


廖金,董國芳,劉暢
(云南民族大學 電氣信息工程學院,云南 昆明 650504)
摘??要:針對無人機巡檢拍攝的架空線路絕緣子設備的照片進行處理,旨在建立一個基于Faster R?CNN目標檢測算法的架空線路絕緣子設備識別與掉串診斷的模型。首先通過TensorFlow建立訓練框架,將收集到的絕緣子數據集訓練FasterR?CNN網絡識別絕緣子,其次利用小波變換去噪增強圖像特征信息,再對經過二值化處理的圖像進行霍夫變換直線檢測以及垂直投影確定有無缺陷。該模型絕緣子識別率為 85.6%,掉串檢測正確率為 96%,有較強的魯棒性。通過這樣一個檢測模型可以及時發現絕緣子設備存在的絕緣隱患,降低出現絕緣故障的風險,并且可以配合無人機巡檢,大大減少人力勞動,更有效地分配人力資源及減少運維的成本。
中圖分類號:TN957.52?34;TP391 ?文獻標識碼:A
文章編號:1004?373X(2022)02?0167?05
0 引 言
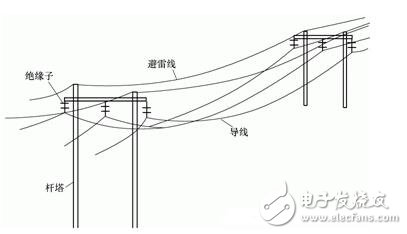
近年來,電力行業發展得極為迅速,電力的需求量增長率也不斷提高,架空線路也不斷的增多,上面的絕緣子設備也相應增加。在架空線路中,絕緣子是一種極其關鍵的絕緣設備,對架空線路的安全運行各個方面都擔負著極其重要的保障作用。架空線路上的絕緣子設備一直都在各種復雜的自然環境中工作,會受到大風、雷雨、灰塵等的影響,致使絕緣子逐漸被劣化,甚至直接被擊穿,并且出現掉串。為了使電力領域快速穩步的發展,架空線路的絕緣技術也需要不斷地尋求突破和創新。同時,對架空線路絕緣設備的完整性檢測也是一個極其重要的環節[1]。在該文中,將人工智能中的圖像識別技術應用到架空線路絕緣子日常巡檢的工作上,為電力系統傳輸工作的智能化發展提供一定的積極作用[2]。
圖像識別技術是通過計算機對獲取的圖像進行處理和分析,最終能識別出所要研究的對象的技術。識別的步驟有圖像預處理、圖像分割、特征提取和分類器設計[3]。傳統的圖像識別算法,如ORB(Oriented Fast andRotated BRIEF)[4]、加速穩健特征(Speeded Up RobustFeatures,SURF)[5]、尺度不變特征變換(Scale?InvariantFeature Transform,SIFT)[6]等都已經取得了一定的成果,但其都需要人工提取圖片的特征信息,導致工作量大以及特征提取不準確和不完善,并且室外架空線路環境復雜多變,設備數量眾多,傳統方法難以適用于架空線路絕緣子識別與掉串檢測。基于神經網絡的目標檢測算法,如R?CNN、Fast R?CNN等,雖然解決了傳統目標檢測算法中計算量大、耗時長、泛化能力弱等問題,但也存在模型檢測耗時長、檢測精度不高,對架空線路實時巡檢存在一定的難度。 針對架空線路絕緣子自動識別與掉串檢測,目前已經有一定的研究成果。基于形態學特征檢測是通過面積篩選、圓形度篩選、長寬比篩選來提取缺陷信息,其圖像角度、方向等會影響到圖像分割的質量,存在一定的檢測誤差[7]。絕緣子的掉串檢測在缺陷檢測方面是一個重點,采用分塊圖像顏色特征和滑動窗口直方圖統計及直方圖匹配判決識別絕緣子掉串位置,但該方法檢測位置不準確[8]。 本文提出一種基于Faster R?CNN目標檢測算法的輸電線路絕緣子識別與掉串診斷模型。首先,用制作的輸電線路巡檢圖像數據集在Faster R?CNN目標檢測網絡中學習各種絕緣子特征,并完成對絕緣子的識別;接著通過小波去噪處理,增強將識別的絕緣子圖片特征;再經過霍夫變換直線檢測根據需要旋轉為水平或垂直的絕緣子旋轉為水平或垂直狀態;最后再對旋轉后的絕緣子進行水平投影或垂直投影,從而找出待測圖片是否有掉串缺陷。本文提出的模型對于傳統檢測方法在復雜環境下有更好的識別準確性及識別速率,且該模型對于絕緣子的掉串檢測有更好的魯棒性。 ?
1 卷積神經網絡模型
卷 積 神 經 網 絡(Convolutional Neural Networks,CNN)的作用是研究對象經過一定的訓練可以讓機器自動識別分類。CNN主要包括卷積層、池化層、全連接層,將圖像送入CNN,通過逐層的卷積和池化以及激活操作,提取圖片的特征信息。然后對提取的大量特征信息不斷學習,進而形成一個可以分類識別的神經網絡模型。
1.1 TensorFlow 框架結構
TensorFlow是一個基于數據流編程的機器學習框架,深度學習和機器學習可以在其上面搭建不同應用的訓練框架,其構架靈活性和較強的可移植性使其被廣泛應用[9]。
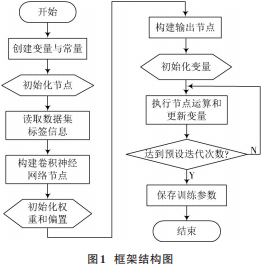
本文以在網絡上爬取的絕緣子圖片建立的數據集為研究對象,在TensorFlow上搭建絕緣子識別模型的訓練框架[10]。通過Faster R?CNN目標檢測算法構建深度卷積神經網絡模型,使用絕緣子圖片建立的數據集對模型進行訓練,使模型具有識別架空線路絕緣子的能力。整個訓練過程是:首先把制作的VOC數據集輸入到該模型,通過卷積層提取圖像的特征信息;然后用激活函數執行激活操作將提取的特征信息形成卷積特征圖;最后對卷積特征圖進行池化操作,降低特征維數,增強泛化能力,形成池化特征圖。通過數次卷積池化操作后,將提取出來的特征傳入全連接層進行識別分類,以達到對架空線路絕緣子設備的識別。整體結構如圖1所示。
1.2 Faster R?CNN 網絡模型
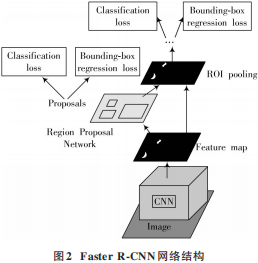
Faster R?CNN是Girshick等人在2016年提出的目標檢測算法[11]。目前基于候選區域的目標檢測算法主要有R?CNN[12]、Fast R?CNN[13]、Faster R?CNN等,其中Faster R?CNN算法采用區域候選網絡(Region ProposalNetwork,RPN)替換掉了選擇性搜索算法產生候選區域,極大地減少了檢測時間,有效地平衡了檢測精度和檢測速度[14]。其網絡結構如圖2所示。上述網絡的實現過程大致如下:首先,將一張張待識別的圖片傳入預訓練卷積神經網絡模型中進行卷積,得到卷積特征圖(Conv Feature Map)。接著,RPN層對得到的卷積特征圖進行處理。RPN的作用是生成區域建議框,在傳入的卷積特征圖上生成一定數量大小不等的anchor box,接著在其中的分類環節判斷 anchor屬于前景(Foreground)還是后景(Background),即判斷其中有目標還是沒目標,并通過另一分支進行邊界框回歸(Bounding BoxRegression),修正anchor box,從而形成有一定擬合度的建議框。ROI池化層的作用是利用RPN層生成的建議框和CNN卷積得到的卷積特征圖生成大小一致的建議特征圖(Proposal Feature Map),然后通過全連接層再輸入到后面的分類回歸網絡中,利用分類層判斷建議框具體的類別,同時利用邊界框回歸層再次對邊界框進行修正,最后得到擬合度相當高的檢測框。
2 掉串檢測
2.1 掉串檢測模型構建
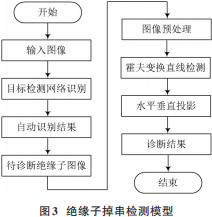
通過Faster R?CNN網絡識別后的絕緣子,相對來說沒有除絕緣子外的背景的干擾。因為絕緣子的結構都具有明顯的規律性,每個絕緣子串大小幾乎相同,且絕緣子的排列間隔距離幾乎相等,因此絕緣子圖片都呈現出很強的條帶狀分布形狀,當一串絕緣子中出現掉串或盤片出現大的缺損,絕緣子串的整體均勻規律就會被破壞。可利用這一特征,通過提取這種規律判斷絕緣子是否出現掉串,就可以完成絕緣子的缺陷識別。所以,只要確定從圖像中提取的規律性特征信息是否被破壞就可以判別絕緣子所處的狀態,但要有效地提取出這些規律性的特征信息,還需要進一步對圖像進行處理。 本文提出的基于Faster R?CNN目標檢測的絕緣子掉串檢測模型,首先將巡檢的架空線路圖像輸入到事先訓練好的神經網絡模型中對絕緣子進行識別;然后對識別到的絕緣子圖像進行小波去噪、二值化操作,增強圖像的特征信息;接著對圖像作霍夫變換直線檢測,將需要旋轉的圖像旋轉至水平或垂直角度;最后對圖像作水平投影或垂直投影。步驟如圖3所示。 2.2 小波去噪處理
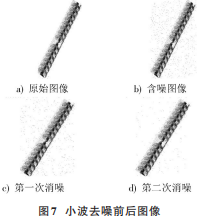
待檢測的原始圖片都會含有一定的噪聲,對檢測結果會產生不利的影響。本文通過小波變換對原始圖片中的噪聲進行過濾[15],利用小波變換的閾值去噪方法對已經識別出絕緣子的圖像進行去噪處理。信號經過小波分解后,信號和噪聲的小波系數明顯不同,信號的小波系數較大,噪聲的小波系數較小,通過選取一個合理的閾值可以將噪聲過濾掉,實現信號和噪聲的分割。實現步驟如下:
1)利用小波變換將灰度圖原始信號分解到不同的基準中;
2)剔除噪聲對應的小波系數,保留信號的小波系數;
3)再對處理后的小波系數進行小波逆變換;
4)將各個基準下的信號整合起來,以此達到去除圖像噪聲的目的。
小波變換去噪比傳統的傅里葉變換去噪更具有優勢,原因在于小波變換在時頻域對信號的局部特征都很敏感,而傅里葉變換在時域上對信號的特征不敏感,因此對圖像邊緣等局部的突變信號難以捕捉,在去除噪聲的同時也會丟失圖像的邊緣信息;而小波變換就能很好地將圖像的邊緣信息保留下來,使圖像的后續處理更加準確。
2.3 二值化處理
圖像二值化就是將灰度圖像素點上的連續灰度值變為兩個固定的離散值,分別為灰度極大值和灰度極小值,將圖像變成黑白兩極分化的效果[16]。二值化處理方法如固定二值化、大律算法(OTSU)、自適應二值化等都是將圖像上的灰度值與對應的閾值作比較,將圖像中灰度值大于或等于對應閾值的灰度值(設置為255),設為目標區域,將其他灰度值(設置為0),設為非目標區域。圖像處理依托二值化能大大壓縮圖像數據的處理量,提高了圖像處理速度,但依舊可以體現圖像的整體和局部特征信息,從而能讓目標的輪廓特征更加清楚直觀,以便于對圖像作進一步的處理。
2.4 霍夫變換直線檢測
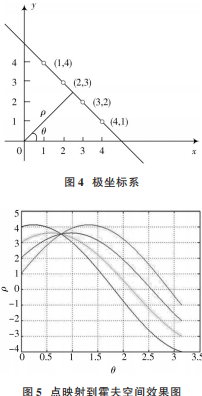
由于無人機拍攝的絕緣子角度不同,識別的絕緣子圖像不一定都是垂直水平的,所以需要將識別圖像旋轉為水平或者垂直位置以便之后的操作。絕緣子都具有極強的條帶狀分布規律,且絕緣子盤片分布均勻,對絕緣子進行霍夫變換直線檢測,得到多條直線[17],將這些直線的平均斜率作為絕緣子質心連線的斜率,從而得出絕緣子需要轉換的角度。在笛卡爾空間中,y=kx+b表示一條直線,將方程變形為b=-kx+y,這就表示霍夫空間中的一條直線。笛卡爾坐標系中的一條直線映射到霍夫空間中就變成了一個點。直線檢測就是找到一定數量的點而形成的直線,在霍夫空間中表現為最多線的公共交點。為了避免直線垂直 x 軸的特殊情況,故用極坐標表示直線:ρ=xcosθ+ysinθ。如圖 4所示,ρ為原點到所在直線的距離,θ是原點到直線的垂線段與橫軸的夾角。遍歷極坐標系下的每個點,將其映射到霍夫空間,極坐標系中一條直線上的點在霍夫空間中對應的曲線會相交于一點,設定相交于一點曲線數量的閾值,可以判定是否構成直線。極坐標系下的點變換到霍夫空間的結果如圖5所示。
3 仿真結果 3.1 絕緣子識別
本實驗從網絡上爬取的圖片采用LabelImg標注工具對圖片就行標注,進而制作出VOC 數據集。用FasterR?CNN深度學習網絡模型對數據集進行訓練,迭代次數達到12000 次后趨于穩定,網絡識別準確率達到85.6%,優于Fast R?CNN網絡算法,具有更高的識別性。絕緣子識別效果圖如圖6所示。

3.2絕緣子掉串檢測
3.2.1圖像小波去噪
小波去噪前后的結果如圖7所示。
3.2.2 圖像二值化
識別的絕緣子原始圖像二值化結果如圖8所示。
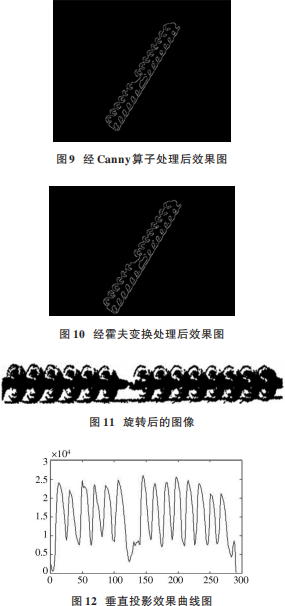
 3.2.3 霍夫變換直線檢測
3.2.3 霍夫變換直線檢測
在霍夫變換直線檢測前需要經 Canny 算子作邊緣檢測,結果如圖9所示。再經霍夫變換直線檢測后,結果如圖10所示。然后計算斜率旋轉一定角度使絕緣子水平,如圖11所示。再對水平后的絕緣子圖像做垂直投影,投影結果如圖12所示。由圖中的垂直投影曲線可以看到,從左起第6個波峰和第7 個波峰之間有明顯的曲線波動異常,由此判定此處有絕緣子掉串的情況,對比絕緣子的原圖片發現確實是在第6個絕緣子后有一個絕緣子掉串。在對50個絕緣子檢測完整性中,有48個檢測正確,有2個檢測錯誤,檢測準確率為96%。其中2個檢測錯誤的原因是掉串發生在絕緣子的邊緣,使其檢測為是完好的絕緣子。
? 4 結 語
隨著人工智能的快速發展,將人工智能應用到電力領域也越來越多。本文提出了一種基于深度學習的絕緣子掉串檢測模型。以Faster R?CNN神經網絡算法為基礎對巡檢的絕緣子進行識別和定位,其添加的 RPN網絡有效地提高了檢測精度和檢測效率。通過對識別的絕緣子預處理、小波去噪、霍夫變換及垂直投影,能對有掉串的絕緣子有較高的檢測準確率,并且能確定掉串位置,對無人機巡檢檢測工作有一定的積極作用。
注:本文通訊作者為董國芳。
參 考 文 獻
[1] 毛鵬飛 . 初探輸電線路無人機巡檢實時通信技術[J]. 通訊世界,2020,27(1):214?215.
[2] 麥俊佳,郭圣,徐振磊,等 .輸電線路多旋翼無人機自動駕駛智能巡檢系統[J].計算機系統應用,2019,28(4):105?110.
[3] 張驥,余娟,汪金禮,等 .基于深度學習的輸電線路外破圖像識別技術[J].計算機系統應用,2018,27(8):176?179.
[4] 曾軍英,馮武林,諶瑤,等 . 一種基于 ORB 特征和運動一致性的圖像校正算法[J].現代電子技術,2019,42(18):171?176.
[5] 熊凱龍,范方亮,汪保玉,等 .基于一種新的級聯分類器的目標檢測系統[J].現代電子技術,2020,43(1):48?52.[6] 吳應永 . 基于 SIFT 的火車車底螺栓圖像識別技術研究[D]. 成都:西南交通大學,2016.
[7] 單成,吳洪潭,石成龍,等 .圖像處理中的絕緣子缺陷檢測方法[J].中國計量學院學報,2010,21(4):297?300.
[8] 林聚財,韓軍,陳舫明,等 .基于彩色圖像的玻璃絕緣子缺陷診斷[J].電網技術,2011,35(1):127?133.
[9] 齊照輝 . 基于 TensorFlow 的卷積神經網絡應用[D]. 武漢:武漢大學,2018.
[10] 龔鋼軍,張帥,吳秋新,等 . 基于 TensorFlow 的高壓輸電線路異物識別[J].電力自動化設備,2019,39(4):204?209.
[11] REN S Q,HE K M,GIRSHICK R,et al. Faster R ? CNN:towards real ? time object detection with region proposalnetworks [J]. IEEE transactions on pattern analysis andmachine intelligence,2017,39(6):1137?1149.
[12] GIRSHICK R, DONAHUE J, DARRELL T, et al. Richfeature hierarchies for accurate object detection and semanticsegmentation [C]// Proceedings of IEEE Conference onComputer Vision and Pattern Recognition. Los Alamitos:IEEE,2014:580?587.
[13] GIRSHICK T R. Fast R ? CNN [C]// Proceedings of IEEEInternational Conference on Computer Vision. Los Alamitos:IEEE,2015:1440?1448.
[14] 陳怡佳 .基于 Faster RCNN 的目標檢測系統[D].哈爾濱:哈爾濱理工大學,2019.
[15] 姜 波 . 基 于 MATLAB 的 小 波 降 噪 研 究 [J]. 電 子 制 作 ,2019(13):87?88.
[16] 李治江,叢林. 基于樸素貝葉斯理論的彩色圖像二值化方法研究[J].數字印刷,2020(1):17?21.
[17] 張麗艷,韓熠,趙藝璇,等 . 霍夫變換和 Faster?RCNN 鐵軌上行人檢測方法[J].大連交通大學學報,2020,41(2):100?103.
作者簡介: 廖 金(1995—),男,四川自貢人,碩士研究生,主要研究領域為人工智能應用。 董國芳(1979—),女,云南德宏人,博士,副教授,碩士生導師,主要研究領域為人工智能應用、智能電網等。 劉暢(1985—),女,白族,云南楚雄人,碩士研究生,云南民族大學國際合作交流處副處長,助理研究員,主要研究方向為智能電網。
編輯:黃飛
?


















 工商網監
工商網監
評論