 電子發(fā)燒友App
電子發(fā)燒友App


作為工業(yè)控制領(lǐng)先芯片方案廠商,德州儀器為 AC 感應(yīng)電機(jī) (ACIM)、刷式直流電機(jī)、無(wú)刷直流電機(jī) (BLDC)、永久磁性同步電機(jī)和步進(jìn)電機(jī)等各類(lèi)電機(jī),尋找合適的模擬和數(shù)字產(chǎn)品、軟件和支持,以精確控制位置、速度和扭矩等關(guān)鍵工業(yè)應(yīng)用實(shí)現(xiàn)最佳解決方案。想了解關(guān)于電機(jī)驅(qū)動(dòng)方面的最新算法和最理想的方案嗎?想為您的電機(jī)驅(qū)動(dòng)找到更合適的方案以適應(yīng)工業(yè)自動(dòng)化系統(tǒng)的新挑戰(zhàn)嗎?趕快報(bào)名參與電子發(fā)燒友網(wǎng)舉辦的賽靈思研討會(huì)——取代傳統(tǒng)MCU方案:用All Programmable技術(shù)提升工業(yè)自動(dòng)化系統(tǒng)的效率和性能,內(nèi)容精彩,絕對(duì)不容錯(cuò)過(guò)!
TI 是全球市場(chǎng)領(lǐng)導(dǎo)者,其利用先進(jìn)的電機(jī)控制專(zhuān)業(yè)技術(shù)方面的豐富經(jīng)驗(yàn),并結(jié)合模擬和嵌入式處理產(chǎn)品系列,可提供完整的電機(jī)系統(tǒng)解決方案。選擇 TI,因?yàn)槲覀兙哂胸S富的電機(jī)專(zhuān)業(yè)技術(shù)、廣泛的選擇范圍,以及全面的支持,可為您提供高效、可靠和經(jīng)濟(jì)的驅(qū)動(dòng)和控制解決方案。
?
TI 提供了廣泛系列的模擬產(chǎn)品、數(shù)字控制器和軟件,可精確控制機(jī)械驅(qū)動(dòng)裝置的位置、速度和扭矩。電機(jī)控制和驅(qū)動(dòng)解決方案適用于小型驅(qū)動(dòng),包括螺線管、DC 或無(wú)刷 DC 及步進(jìn);也適用于大型驅(qū)動(dòng),如利用較高電壓(通常數(shù)百伏)的 AC 開(kāi)環(huán)和閉環(huán)系統(tǒng)。按電機(jī)類(lèi)型查看解決方案。
DRV8x 集成電機(jī)驅(qū)動(dòng)器系列 使客戶能夠快速輕松地旋轉(zhuǎn)電機(jī),從而加快了上市時(shí)間并顯著簡(jiǎn)化了設(shè)計(jì)。通過(guò)集成閘極驅(qū)動(dòng)電路、感應(yīng)放大器、保護(hù)、FETS、行業(yè)標(biāo)準(zhǔn)控制界面和驅(qū)動(dòng)算法等,設(shè)計(jì)的復(fù)雜程度、電路板面積和旋轉(zhuǎn)電機(jī)的時(shí)間都顯著減少。借助過(guò)流保護(hù)、熱保護(hù)、擊穿保護(hù)和欠壓保護(hù)等片上保護(hù),DRV8x 系列很強(qiáng)大、可靠且受到全面保護(hù)。
除了提供適用于各種電機(jī)控制應(yīng)用的高性能模擬和混合信號(hào)器件,TI 還提供高性能、超低功耗微處理器以應(yīng)對(duì)每個(gè)設(shè)計(jì)挑戰(zhàn)。TI C2000? 微控制器系列結(jié)合了高性能和實(shí)時(shí)控制,可提供針對(duì)電機(jī)控制的強(qiáng)大單芯片解決方案。MSP430F54xx 系列具有功能強(qiáng)大的 16 位 RISC CPU、16 位寄存器以及豐富的內(nèi)置精密模擬外設(shè)集,旨在實(shí)現(xiàn)最高的代碼效率。最后,TI Stellaris 系列的 ARM? Cortex?-M3 微處理器具有確定性性能和專(zhuān)為同步高級(jí)運(yùn)動(dòng)控制和實(shí)時(shí)連接設(shè)計(jì)的目標(biāo)功能,包括高速運(yùn)動(dòng)控制 PWM、QEI、快速 ADC 和多個(gè)定時(shí)器,以及超快處理器速度、大量?jī)?nèi)存選項(xiàng)和多種通信接口。
為您提供有創(chuàng)新設(shè)計(jì)參考價(jià)值下載資料:德州儀器電機(jī)驅(qū)動(dòng)與控制解決方案指南
電機(jī)驅(qū)動(dòng)和控制解決方案信號(hào)鏈
?
電機(jī)驅(qū)動(dòng)和控制解決方案產(chǎn)品

特色電機(jī)控制工具和軟件

接下來(lái)會(huì)分別介紹德州儀器:AC 感應(yīng)電機(jī),刷式直流電機(jī),無(wú)刷直流 (BLDC) ,永久磁性同步電機(jī) (PMSM) ,步進(jìn)電機(jī)簡(jiǎn)介及相關(guān)方案。
一、電機(jī)控制 - AC 感應(yīng)電機(jī) (ACIM) 概述
AC 感應(yīng)電機(jī) (ACIM) 是消費(fèi)電子類(lèi)應(yīng)用和工業(yè)應(yīng)用中最受歡迎的電機(jī),代表了工業(yè)革命的力量。十九世紀(jì)末,Nicola Tesla 首次構(gòu)想出“無(wú)火花”電機(jī)的概念,即由兩個(gè)靜態(tài)相位以正交關(guān)系構(gòu)成的多相結(jié)構(gòu)。自此以來(lái),又改為更為常用的 3 相結(jié)構(gòu),實(shí)現(xiàn)了電機(jī)電壓和電流的平衡操作。
該電機(jī)沒(méi)有刷式直流電機(jī)那樣的刷子/換向器結(jié)構(gòu),不會(huì)產(chǎn)生火花相關(guān)的問(wèn)題,如電噪聲、刷子磨損、摩擦高和可靠性差等。轉(zhuǎn)子和定子結(jié)構(gòu)中磁性的消失進(jìn)一步增強(qiáng)了可靠性,也降低了制造成本。在高功率應(yīng)用中(如 500 HP 和更高應(yīng)用),AC 感應(yīng)電機(jī)是現(xiàn)有最高效的電機(jī),可以達(dá)到 97% 或更高的效率額定值。但在輕載條件下,產(chǎn)生轉(zhuǎn)子磁通所需的正交磁流占定子電流的很大部分,導(dǎo)致效率降低、功率因數(shù)操作較差。
ACIM 使用正弦電壓和電流驅(qū)動(dòng)時(shí)表現(xiàn)最佳。ACIM 的優(yōu)點(diǎn)之一是能通過(guò)低扭矩紋波實(shí)現(xiàn)難以置信的順暢操作。為了實(shí)現(xiàn)此目的,多數(shù) ACIM 包含開(kāi)槽定子結(jié)構(gòu),其中繞線按正弦繞線分布置于槽中,從而在氣隙中呈現(xiàn)正弦磁通分布。此磁通也連接轉(zhuǎn)子繞組,轉(zhuǎn)子繞組的兩端短接銅棒或鋁棒,并安裝在軟鐵或其它鐵基材料組成的堆棧式層壓結(jié)構(gòu)上。在大多數(shù)情況下,降低轉(zhuǎn)子棒的電阻可以提高電機(jī)效率。隨著這些導(dǎo)體中的磁通減少,轉(zhuǎn)子棒中將施加 d-flux/dt 電壓,從而在轉(zhuǎn)子中產(chǎn)生電流。換言之,電流從定子電路感應(yīng)到轉(zhuǎn)子電路,與從標(biāo)準(zhǔn)變壓器的初級(jí)線圈感應(yīng)二次電流差不多。此轉(zhuǎn)子電流會(huì)產(chǎn)生自己的磁通,并與定子 mmF 交互產(chǎn)生扭矩。但是,為了在轉(zhuǎn)子棒上實(shí)現(xiàn) d-flux/dt 效應(yīng),轉(zhuǎn)子不能以定子磁場(chǎng)相同的旋轉(zhuǎn)速度旋轉(zhuǎn)。因此,感應(yīng)電機(jī)歸類(lèi)為異步電機(jī)。定子磁通矢量與轉(zhuǎn)子之間的轉(zhuǎn)速差異稱(chēng)為轉(zhuǎn)差。隨著電機(jī)軸所需扭矩增加,轉(zhuǎn)差率也會(huì)增加。總之,電機(jī)速度是定子極數(shù)、電機(jī)扭矩(最終為電機(jī)轉(zhuǎn)差)和 AC 輸入電壓頻率的函數(shù)關(guān)系。
3 相拓?fù)涫亲兯賾?yīng)用的理想選擇。3 相轉(zhuǎn)換器的常用方法如圖所示,只需改變所應(yīng)用波形的電壓和頻率(開(kāi)環(huán) V/Hz 或標(biāo)量控制),即可控制電機(jī)速度。在扭矩環(huán)路周?chē)乩@速度環(huán)路來(lái)采用場(chǎng)定向控制 (FOC),也可控制速度。前者可以通過(guò)經(jīng)濟(jì)的器件(如 MSP430)輕松實(shí)現(xiàn),但 FOC 更適合強(qiáng)大的 32 位處理器(如 TI C2000 處理器)。
AC 感應(yīng)電機(jī)也有單相版本。多數(shù)單相版本實(shí)際上具有雙相,其中一個(gè)相位用于幫助啟動(dòng)電機(jī)。一旦電機(jī)達(dá)到一定速度,該相位斷開(kāi),這樣電機(jī)就只在一個(gè)相位上運(yùn)行。
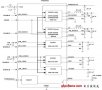
AC 感應(yīng)電機(jī) (ACIM) 系統(tǒng)的方框圖 (SBD),它具有微處理器、閘極驅(qū)動(dòng)器、隔離器件、工業(yè)接口和電源管理。
AC 感應(yīng)電機(jī)
設(shè)計(jì)注意事項(xiàng)
AC 感應(yīng)電機(jī)概述
AC 感應(yīng)電機(jī) (ACIM) 是消費(fèi)電子類(lèi)應(yīng)用和工業(yè)應(yīng)用中最受歡迎的電機(jī)。此電機(jī)高度可靠,設(shè)計(jì)簡(jiǎn)單,其沒(méi)有刷子,因此不存在磨損,并且制造成本極低。另一重要特性是轉(zhuǎn)子不會(huì)產(chǎn)生任何移動(dòng)接觸,因此不會(huì)產(chǎn)生火花。但是,ACIM 與其它電機(jī)類(lèi)型相比,效率較低。
ACIM 速度取決于 AC 輸入電壓的頻率和定子繞線中的極數(shù)。AC 感應(yīng)電機(jī)提供單相和三相版本;三相是變速應(yīng)用的理想選擇。
微處理器
TI 的 Stellaris? C2000? 以及 Hercules? 微處理器 (MCU) 系列非常適合于控制 AC 感應(yīng)電機(jī)。所有這些 MCU 系列均可用于實(shí)施標(biāo)量或矢量控制技術(shù)。
C2000 MCU 適用于實(shí)時(shí)操作并具有高分辨率脈寬調(diào)制器 (PWM),可對(duì)閘極驅(qū)動(dòng)器進(jìn)行精確控制。雙采樣保持、12 位、高速模數(shù)轉(zhuǎn)換器 (ADC) 可對(duì)任何傳感器輸入進(jìn)行高精度采樣。
高性能 PWM 和 ADC 相結(jié)合可確保低扭矩紋波和高效電機(jī)控制。功能強(qiáng)大的 C2000 MCU 內(nèi)核架構(gòu)可快速執(zhí)行數(shù)學(xué)算法,并通過(guò)矢量控制控制電機(jī)。
Stellaris MCU 基于廣泛使用的 ARM Cortex M3 內(nèi)核并具有所有與電機(jī)控制相關(guān)的集成板載外設(shè)。Stellaris MCU 具有 10 位 ADC 和電機(jī)控制特定的 PWM,可為電機(jī)提供高效控制。板載通信外設(shè)(例如 USB 和以太網(wǎng))啟用 MCU 用作聯(lián)網(wǎng)控制器,也可執(zhí)行電機(jī)控制。
Hercules 安全 MCU 是基于廣泛使用的 ARM Cortex R4 內(nèi)核,設(shè)計(jì)為簡(jiǎn)化開(kāi)發(fā)和認(rèn)證的安全關(guān)鍵型系統(tǒng)。Hercules MCU 具有多達(dá) 2 個(gè) 12 位 ADC。靈活的 HET 協(xié)處理器具有特定于電機(jī)控制的 PWM,可為電機(jī)提供高效控制。板載通信外設(shè)(例如,啟用 MCU 用作可同時(shí)執(zhí)行安全電機(jī)控制的安全聯(lián)網(wǎng)控制器的 USB、以太網(wǎng)和 CAN)。
隔離
TI 數(shù)字隔離器具有邏輯輸入和輸出緩沖器,這些緩沖器由 TI 的二氧化硅 (SiO2) 隔離勢(shì)壘進(jìn)行隔離,可提供 4kV 隔離。當(dāng)與隔離電源配合使用時(shí),這些器件可阻止高電壓、隔離接地以及防止噪聲電流進(jìn)入本地接地并干擾或損害敏感電路。
接口/連接
傳統(tǒng)模擬 RS-232/RS-485 接口一直是電機(jī)控制應(yīng)用的常見(jiàn)選擇。展望未來(lái),設(shè)計(jì)人員將在其產(chǎn)品中集成主流接口,如以太網(wǎng)、USB 和 CAN。
TI 致力于同時(shí)為傳統(tǒng)和新興工業(yè)接口提供解決方案。例如,TI 最近推出了全世界首款隔離式 CAN 收發(fā)器 ISO1050。
電源管理
德州儀器 (TI) 提供從標(biāo)準(zhǔn) IC 到高性能插件、變壓器、數(shù)字電源 MOSFET 和集成電源模塊的電源管理 IC 解決方案。
從 AC/DC 和 DC/DC 電源、線性穩(wěn)壓器和非隔離式開(kāi)關(guān) DC/DC 穩(wěn)壓器到 PMIC 和電源及顯示解決方案,德州儀器 (TI) 的電源管理 IC 解決方案都能幫助您完成項(xiàng)目開(kāi)發(fā)。
?
二、電機(jī)控制 - 刷式直流電機(jī)概述
刷式直流電機(jī)是現(xiàn)有歷史最久的電機(jī)拓?fù)渲弧K鼈儗⒐潭ㄋ⒆影惭b在定子機(jī)座上,摩擦轉(zhuǎn)子上的換向片,而后者又連接至旋轉(zhuǎn)的線圈段。隨著電機(jī)旋轉(zhuǎn),不同轉(zhuǎn)子線圈不斷連接和斷開(kāi),這樣轉(zhuǎn)子產(chǎn)生的凈磁場(chǎng)相對(duì)于定子機(jī)座就是固定的,且通過(guò)定子磁場(chǎng)正確定向,從而產(chǎn)生扭矩。當(dāng)換向片旋轉(zhuǎn)過(guò)刷子時(shí),這些特定轉(zhuǎn)子線圈段的電觸頭將會(huì)斷開(kāi)。由于轉(zhuǎn)子線圈是電感的,而電感器生成高回掃電壓來(lái)抵抗電流變化,因此刷子和斷開(kāi)的換向片之間會(huì)產(chǎn)生火花。這些火花會(huì)導(dǎo)致很多負(fù)面結(jié)果,如電噪聲、效率降低,以及某些情況下的危險(xiǎn)操作。此外,刷子必須安裝彈簧來(lái)抵抗換向片,以確保電接觸良好。這進(jìn)一步降低了效率,需要定期維護(hù)更換刷子。
盡管有諸多劣勢(shì),但刷式直流電機(jī)有一顯著優(yōu)勢(shì):成本。由于控制刷式直流電機(jī)相對(duì)簡(jiǎn)單,因此還廣泛用于系統(tǒng)成本是主要驅(qū)動(dòng)因素的應(yīng)用中。在使用永久磁性生成定子磁通的拓?fù)渲校a(chǎn)生的速度/扭矩曲線非常有線性特征。因此,刷式直流電機(jī)歷來(lái)常用于工業(yè)伺服應(yīng)用,速度和扭矩分別與所應(yīng)用的電壓和電流成正比。但是,半導(dǎo)體器件的跌價(jià)使得電源轉(zhuǎn)換和控制的成本降低。因此,許多直流電機(jī)被交流電機(jī)所取代,后者帶來(lái)了效率和可靠性提高等優(yōu)勢(shì)。
刷式直流電機(jī)的主題多種多樣,如直流并聯(lián)電機(jī)和通用電機(jī),兩者都使用定子線圈代替永久磁性。在直流并聯(lián)電機(jī)中,定子線圈與轉(zhuǎn)子電路并聯(lián);而在通用電機(jī)中,定子線圈與轉(zhuǎn)子串聯(lián)。通用電機(jī)在家電應(yīng)用中尤其常用,因?yàn)樗哂懈邌?dòng)扭矩,可以高速運(yùn)行。只需添加串聯(lián)晶閘管并進(jìn)行交流相位控制,便可輕松對(duì)通用電機(jī)進(jìn)行速度控制。但是,刷子/換向器結(jié)構(gòu)常見(jiàn)于這些電機(jī)類(lèi)型,因此它們具有標(biāo)準(zhǔn) PM 刷式直流電機(jī)相同的劣勢(shì)。
方框圖
刷式直流電機(jī)系統(tǒng)的方框圖 (SBD),它具有微處理器、閘極驅(qū)動(dòng)器、隔離器件、工業(yè)接口和電源管理。
刷式直流電機(jī)
設(shè)計(jì)注意事項(xiàng)
刷式直流電機(jī)概述
刷式直流電機(jī)使用刷子進(jìn)行換向。電樞或轉(zhuǎn)子具有繞線,可端接至換向器。刷子通過(guò)形成或斷開(kāi)接觸為電樞提供電源。
定子可能具有兩個(gè)或更多永久磁性;相反的定子磁性極性和激磁繞線異極相吸,導(dǎo)致轉(zhuǎn)子旋轉(zhuǎn)。當(dāng)轉(zhuǎn)子與定子位置對(duì)齊時(shí),刷子將跨越換向器并驅(qū)動(dòng)下一個(gè)繞線。
刷式直流電機(jī)需要維護(hù)并具有線性扭矩/電流曲線。這些電機(jī)易于控制,其速度和扭矩與電流和電壓成正比。
微處理器
具有 4 個(gè)脈寬調(diào)制器 (PWM) 信號(hào)的任何 MCU 系列均可以用于驅(qū)動(dòng)連接到刷式直流電機(jī)的 H 橋 DC/DC 轉(zhuǎn)換器。根據(jù)控制算法的復(fù)雜性,反饋控制可能使用霍爾傳感器或編碼器。
鑒于其在工作模式和休眠模式中的超低功耗操作功能,TI 的 MSP430 可以成為控制低端、電池供電的刷式直流電機(jī)系統(tǒng)的理想選擇。
C2000? 和 Stellaris? MCU 具有 QEI 輸入,可接受編碼器輸入。Hercules? MCU 可通過(guò)靈活的 HET 協(xié)處理器接收編碼器輸入。如果需要高性能和實(shí)時(shí)操作,C2000 MCU 系列就是最佳選擇。C2000 或 Stellaris MCU 可滿足中端系統(tǒng)要求。Hercules MCU 是系統(tǒng)需要基于 IEC61508 等安全標(biāo)準(zhǔn)認(rèn)證時(shí)的首選并可支持各種性能需求。
隔離
TI 數(shù)字隔離器具有邏輯輸入和輸出緩沖器,這些緩沖器由 TI 的二氧化硅 (SiO2) 隔離勢(shì)壘進(jìn)行隔離,可提供 4kV 隔離。
當(dāng)與隔離電源配合使用時(shí),這些器件可阻止高電壓、隔離接地以及防止噪聲電流進(jìn)入本地接地并干擾或損害敏感電路。
接口/連接
傳統(tǒng)模擬 RS-232/RS-485 接口一直是電機(jī)控制應(yīng)用的常見(jiàn)選擇。展望未來(lái),設(shè)計(jì)人員將在其產(chǎn)品中集成主流接口,如以太網(wǎng)、USB 和 CAN。
TI 致力于同時(shí)為傳統(tǒng)和新興工業(yè)接口提供解決方案。例如,TI 最近推出了全世界首款隔離式 CAN 收發(fā)器 ISO1050。
電源管理
德州儀器 (TI) 提供從標(biāo)準(zhǔn) IC 到高性能插件、變壓器、數(shù)字電源 MOSFET 和集成電源模塊的電源管理 IC 解決方案。
從 AC/DC 和 DC/DC 電源、線性穩(wěn)壓器和非隔離式開(kāi)關(guān) DC/DC 穩(wěn)壓器到 PMIC 和電源及顯示解決方案,德州儀器 (TI) 的電源管理 IC 解決方案都能幫助您完成項(xiàng)目開(kāi)發(fā)。
?
三、電機(jī)控制 - 無(wú)刷直流 (BLDC) 電機(jī)
無(wú)刷直流 (BLDC) 電機(jī)可以想象成與刷式直流電機(jī)截然相反,其中永久磁性在轉(zhuǎn)子上,而繞線在定子上。因此,該電機(jī)沒(méi)有刷子和換向器,消除了與刷式直流電機(jī)產(chǎn)生火花相關(guān)的劣勢(shì)。
該電機(jī)被稱(chēng)為直流電機(jī),是因?yàn)槠渚€圈通過(guò)直流電源驅(qū)動(dòng),而直流電源是按預(yù)定順序的形式應(yīng)用到不同的定子線圈。這一過(guò)程稱(chēng)為換向。但是,BLDC 并不恰當(dāng),因?yàn)樵撾姍C(jī)實(shí)際上屬于交流電機(jī)。在電路循環(huán)過(guò)程中,每個(gè)線圈中的電流正負(fù)交替。定子一般是凸極結(jié)構(gòu),旨在產(chǎn)生梯形反電動(dòng)勢(shì)波形,盡可能符合所應(yīng)用的換向電壓波形。但是實(shí)際上很難做到,產(chǎn)生的反電動(dòng)勢(shì)波形通常更像正弦,而非梯形。因此,PMSM 電機(jī)使用的許多控制技術(shù)(如場(chǎng)定向控制)同樣適用于 BLDC 電機(jī)。
對(duì) BLDC 電機(jī)的另一個(gè)誤解是關(guān)于其如何驅(qū)動(dòng)。不同于開(kāi)環(huán)步進(jìn)應(yīng)用中驅(qū)動(dòng)的定子線圈決定轉(zhuǎn)子位置,在 BLDC 電機(jī)中,轉(zhuǎn)子位置決定要驅(qū)動(dòng)哪個(gè)定子線圈。定子磁通矢量位置必須與轉(zhuǎn)子磁通矢量位置保持同步(而非相反),以使電機(jī)操作順暢。要實(shí)現(xiàn)這一目的,需要了解轉(zhuǎn)子位置來(lái)確定要驅(qū)動(dòng)的定子線圈。現(xiàn)有多種技術(shù)可實(shí)現(xiàn)這一目的,但最常用的技術(shù)是使用霍爾效應(yīng)傳感器監(jiān)控轉(zhuǎn)子位置。遺憾的是,這些傳感器及其相關(guān)連接器和線束會(huì)增加系統(tǒng)成本,并降低可靠性。
為減少這些問(wèn)題,已有多種技術(shù)開(kāi)發(fā)出來(lái)用于消除這些傳感器,進(jìn)而實(shí)現(xiàn)無(wú)傳感器操作。多數(shù)技術(shù)依靠在電機(jī)旋轉(zhuǎn)時(shí),從定子繞線的反電動(dòng)勢(shì)波形中提取位置信息。但是,依靠反電動(dòng)勢(shì)傳感的技術(shù)在電機(jī)旋轉(zhuǎn)緩慢或靜止時(shí)便無(wú)用武之地,因?yàn)榇藭r(shí)反電動(dòng)勢(shì)波形很弱或根本不存在。因此,我們不斷開(kāi)發(fā)新技術(shù),以在低轉(zhuǎn)速或零轉(zhuǎn)速時(shí)從其它信號(hào)中獲取轉(zhuǎn)子位置信息。
BLDC 電機(jī)在效率額定值方面占絕對(duì)優(yōu)勢(shì),一般可達(dá)到 95% 左右。當(dāng)前對(duì)新非晶合金材料的研究正在將這一數(shù)字推向新高。已有報(bào)道稱(chēng) 100W 范圍內(nèi)效率為 96%。BLDC 電機(jī)還在爭(zhēng)奪“世界最快電機(jī)”之稱(chēng),部分電機(jī)速度可達(dá)到數(shù)十萬(wàn) RPM(其中一項(xiàng)應(yīng)用中已報(bào)道 400K RPM)。
最常用的 BLDC 電機(jī)拓?fù)涫褂?3 相定子結(jié)構(gòu)。因此,標(biāo)準(zhǔn)的 6 晶體管反向器是最常用的功率級(jí),如圖所示。根據(jù)運(yùn)行要求(含傳感器與 無(wú)傳感器、換向與 正弦、PWM 與 SVM 等),有很多方法可驅(qū)動(dòng)晶體管來(lái)達(dá)到所需目標(biāo),不勝枚舉。這對(duì)一般位于微處理器中的 PWM 發(fā)生器的靈活性提出了極高要求。好消息是,TI 的電機(jī)控制處理器可輕松滿足這些要求。
方框圖
無(wú)刷直流電機(jī) (BLDC) 系統(tǒng)的方框圖 (SBD),它具有微處理器、閘極驅(qū)動(dòng)器、隔離器件、工業(yè)接口和電源管理。
無(wú)刷直流電機(jī) (BLDC)
設(shè)計(jì)注意事項(xiàng)
無(wú)刷直流 (BLDC) 電機(jī)概述
無(wú)刷直流電機(jī)具有定子繞線和永久磁性轉(zhuǎn)子。繞線連接到控制電子,且電機(jī)內(nèi)部沒(méi)有刷子和換向器。電子類(lèi)似于換向器驅(qū)動(dòng)適當(dāng)?shù)睦@線;在圍繞定子旋轉(zhuǎn)的移動(dòng)模式中驅(qū)動(dòng)繞線。驅(qū)動(dòng)的定子繞線引導(dǎo)轉(zhuǎn)子磁性。
BLDC 電機(jī)效率更高,運(yùn)行更快更安靜,需要電子以控制旋轉(zhuǎn)場(chǎng)。BLDC 電機(jī)制造成本更低,易于維護(hù)。
驅(qū)動(dòng) BLDC 電機(jī)需要三相反向器。反向器包含三個(gè)半 H 橋,使用輔助信號(hào)控制其高位和低位開(kāi)關(guān)。在關(guān)閉高側(cè)開(kāi)關(guān)和開(kāi)啟低側(cè)開(kāi)關(guān)之間保有延遲是非常重要的。這將消除潛在的開(kāi)關(guān)短路。
微處理器
TI 的 C2000? 系列 MCU 可以通過(guò)使用標(biāo)量或矢量控制技術(shù)控制 BLDC 電機(jī)。了解轉(zhuǎn)子位置對(duì)于高效控制 BLDC 電機(jī)非常重要。通過(guò)連接至電機(jī)的霍爾傳感器或旋轉(zhuǎn)式編碼器能夠檢測(cè)到轉(zhuǎn)子的位置。這些傳感器輸入用于含傳感器的反饋控制系統(tǒng)。
轉(zhuǎn)子位置還可通過(guò)使用反電動(dòng)勢(shì)電壓信息進(jìn)行估算。此反饋控制模式無(wú)需使用傳感器和附加接線。位置或度評(píng)估器也可用于計(jì)算轉(zhuǎn)子位置。
C2000 MCU 上的集成高速 12 位 ADC 轉(zhuǎn)換器、高分辨率脈寬調(diào)制器 (PWM) 和正交編碼器輸入 (QEI) 使其適合于實(shí)施 BLDC 電機(jī)控制。C2000 MCU 內(nèi)核能夠在短時(shí)間內(nèi)執(zhí)行復(fù)雜的數(shù)學(xué)函數(shù),使此 MCU 系列成為實(shí)施矢量控制技術(shù)和同時(shí)控制多個(gè)電機(jī)的理想選擇。此系列的 PWM 具有可編程死區(qū)延遲,可驅(qū)動(dòng)高側(cè)和低側(cè)閘極驅(qū)動(dòng)器。C2000 MCU 還可通過(guò)使用梯形或正弦控制驅(qū)動(dòng) BLDC 電機(jī)。
Stellaris? 系列 MCU 向偏愛(ài)開(kāi)放式構(gòu)架內(nèi)核的客戶提供基于 ARM 的解決方案。這些 MCU 還為傳感器的控制提供集成 ADC、電機(jī)控制特定的 PWM 和 QEI 輸入。其基于硬件的故障檢測(cè)系統(tǒng)可更快地關(guān)閉系統(tǒng),無(wú)需軟件干預(yù)。這些 MCU 也可用于實(shí)施標(biāo)量和矢量控制技術(shù)。
MSP430 器件基于 16 位 RISC 架構(gòu),在工作模式和休眠模式中具有超低功耗操作功能。通過(guò)使用接受較低性能的標(biāo)量技術(shù),這些 MCU 可用于 BLDC 電機(jī)控制。集成驅(qū)動(dòng)器可配置為 PWM 輸出并可通過(guò)梯形控制控制閘極驅(qū)動(dòng)器。
Hercules? 安全 MCU 可提供基于 ARM Cortex-R4f 的解決方案并被認(rèn)證為適合用于需要實(shí)現(xiàn) IEC61508 SIL-3 安全級(jí)別的系統(tǒng)中。這些 MCU 還可通過(guò)靈活的 HET 協(xié)處理器提供集成浮點(diǎn)、12 位 ADC、特定于電機(jī)控制的 PWM 及編碼器輸入。Hercules 安全 MCU 還可用于實(shí)施標(biāo)量和矢量控制技術(shù)并支持各種性能需求。
隔離
TI 數(shù)字隔離器具有邏輯輸入和輸出緩沖器,這些緩沖器由 TI 的二氧化硅 (SiO2) 隔離勢(shì)壘進(jìn)行隔離,可提供 4kV 隔離。
當(dāng)與隔離電源配合使用時(shí),這些器件可阻止高電壓、隔離接地以及防止噪聲電流進(jìn)入本地接地并干擾或損害敏感電路。
接口/連接
傳統(tǒng)模擬 RS-232/RS-485 接口一直是電機(jī)控制應(yīng)用的常見(jiàn)選擇。展望未來(lái),設(shè)計(jì)人員將在其產(chǎn)品中集成主流接口,如以太網(wǎng)、USB 和 CAN。
TI 致力于同時(shí)為傳統(tǒng)和新興工業(yè)接口提供解決方案。例如,TI 最近推出了全世界首款隔離式 CAN 收發(fā)器 ISO1050。
電源管理
德州儀器 (TI) 提供從標(biāo)準(zhǔn) IC 到高性能插件、變壓器、數(shù)字電源 MOSFET 和集成電源模塊的電源管理 IC 解決方案。從 AC/DC 和 DC/DC 電源、線性穩(wěn)壓器和非隔離式開(kāi)關(guān) DC/DC 穩(wěn)壓器到 PMIC 和電源及顯示解決方案,德州儀器 (TI) 的電源管理 IC 解決方案都能幫助您完成項(xiàng)目開(kāi)發(fā)。
四、電機(jī)控制 - 永久磁性同步電機(jī) (PMSM)
永久磁性同步電機(jī) (PMSM) 可以看做 AC 感應(yīng)電機(jī)和無(wú)刷直流電機(jī) (BLDC) 的交叉產(chǎn)品。它們具有與 BLDC 電機(jī)相似的轉(zhuǎn)子結(jié)構(gòu),其中包含永久磁性。但是,它們的定子結(jié)構(gòu)類(lèi)似于 ACIM“表親”的定子結(jié)構(gòu),其中繞線的構(gòu)建方式可在機(jī)器氣隙中形成正弦磁通密度。因此,使用正弦波形驅(qū)動(dòng)時(shí)運(yùn)行最佳。但不同于 ACIM “親緣產(chǎn)品”,PMSM 電機(jī)在使用開(kāi)環(huán)標(biāo)量 V/Hz 控制時(shí)運(yùn)行較差,因?yàn)樗矐B(tài)條件下沒(méi)有提供機(jī)械阻尼的轉(zhuǎn)子線圈。場(chǎng)定向控制是 PMSM 最常使用的控制技術(shù)。因此,扭矩紋波可以極低,這與 ACIM 不分伯仲。但是,較之 ACIM,同等大小的 PMSM 電機(jī)可提供更高的功率密度。這是因?yàn)閷?duì)于感應(yīng)電機(jī),部分定子電流需要“感應(yīng)”轉(zhuǎn)子電流來(lái)產(chǎn)生轉(zhuǎn)子磁通。這些附加電流會(huì)在電機(jī)內(nèi)部產(chǎn)生熱量。但在 PMSM 中,轉(zhuǎn)子磁通已通過(guò)轉(zhuǎn)子上的永久磁性建立。
多數(shù) PMSM 利用轉(zhuǎn)子表面安裝的永久磁性。這使得電機(jī)呈現(xiàn)“圓”磁場(chǎng),而電機(jī)扭矩是轉(zhuǎn)子磁性和定子電磁之間反作用力的結(jié)果。這樣,將典型 FOC 應(yīng)用的直軸電流調(diào)節(jié)為 0,可使最佳扭矩角為 90 度。但部分 PMSM 的磁性埋在轉(zhuǎn)子結(jié)構(gòu)內(nèi)。這些電機(jī)被稱(chēng)為“內(nèi)藏式永久磁性電機(jī)”或 IPM 電機(jī)。因此,特定空間角度的徑向磁通較其它角度更集中。這便產(chǎn)生了名為“磁阻扭矩”的附加扭矩分量,它是由集中和非集中磁通路徑的電機(jī)電感變化引起的。這使得最佳 FOC 扭矩角大于 90 度,需要將直軸電流調(diào)節(jié)為交軸電流固定的負(fù)比率。該負(fù)直軸電流也會(huì)導(dǎo)致磁場(chǎng)變?nèi)酰瑥亩档椭陛S的磁通密度,反過(guò)來(lái)減少部分磁芯損耗。因此,IPM 電機(jī)對(duì)于給定幀大小可提供更高的電源輸出。這些電機(jī)逐漸成為混合電動(dòng)汽車(chē)、電器和 HVAC 變速應(yīng)用的牽引電機(jī)。
IPM 電機(jī)展現(xiàn)出的凸極還為無(wú)傳感器控制應(yīng)用提供了額外優(yōu)勢(shì)。在許多情況下,凸極信號(hào)的強(qiáng)度足以用來(lái)確定靜止和低速運(yùn)行狀態(tài)下的轉(zhuǎn)子位置。有些無(wú)傳感器 FOC 設(shè)計(jì)在低速時(shí)使用凸極映射,然后轉(zhuǎn)換為電機(jī)加速時(shí)的反電動(dòng)勢(shì)查看器模型。
方框圖
永久磁性同步電機(jī) (PMSM) 系統(tǒng)的方框圖 (SBD),它具有微處理器、閘極驅(qū)動(dòng)器、隔離器件、工業(yè)接口和電源管理。
永久磁性同步
設(shè)計(jì)注意事項(xiàng)
永久磁性同步電機(jī) (PMSM) 概述
永久磁性同步電機(jī) (PMSM) 與 AC 感應(yīng)電機(jī)或無(wú)刷直流電機(jī) (BLDC) 非常相似。它們都具有永久磁性轉(zhuǎn)子和繞線定子。
PMSM 電機(jī)通常使用正弦波形控制,而 BLDC 電機(jī)通常使用梯形信號(hào)控制,梯形信號(hào)也稱(chēng)為六步換向。
PMSM 的正弦控制效率很高,電機(jī)操作順暢,可最大程度地減少震動(dòng)并降低噪聲。對(duì) PMSM 電機(jī)使用場(chǎng)定向控制 (FOC) 技術(shù)還可最大程度地減少系統(tǒng)生成的扭矩紋波和電磁干擾。PMSM 電機(jī)就大小與 AC 感應(yīng)電機(jī) (ACIM) 相比時(shí),可提供更高的功率密度。
微處理器
TI 的 C2000? 系列 MCU 可以通過(guò)使用標(biāo)量或矢量控制技術(shù)控制 PMSM 電機(jī)。了解轉(zhuǎn)子位置對(duì)于高效控制 PMSM 電機(jī)非常重要。通過(guò)連接至電機(jī)的霍爾傳感器或旋轉(zhuǎn)式編碼器能夠檢測(cè)到轉(zhuǎn)子的位置。這些傳感器輸入用于含傳感器的反饋控制系統(tǒng)。
轉(zhuǎn)子位置還可通過(guò)使用反電動(dòng)勢(shì)電壓信息進(jìn)行估算。此反饋控制模式無(wú)需使用傳感器和附加接線。位置或速度評(píng)估器也可用于計(jì)算轉(zhuǎn)子位置。
C2000 MCU 上的集成高速 12 位 ADC 轉(zhuǎn)換器、高分辨率脈寬調(diào)制器 (PWM) 和正交編碼器輸入 (QEI) 使其適合于實(shí)施 PMSM 電機(jī)控制。C2000 MCU 內(nèi)核能夠在短時(shí)間內(nèi)執(zhí)行復(fù)雜的數(shù)學(xué)函數(shù),使此 MCU 系列成為實(shí)施矢量控制技術(shù)和同時(shí)控制多個(gè)電機(jī)的理想選擇。此系列的 PWM 具有可編程死區(qū)延遲,可驅(qū)動(dòng)高側(cè)和低側(cè)閘極驅(qū)動(dòng)器。
Stellaris? 系列 MCU 向偏愛(ài)開(kāi)放式構(gòu)架內(nèi)核的客戶提供基于 ARM 的解決方案。這些 MCU 還為傳感器的控制提供集成 ADC、特定于電機(jī)控制的 PWM 和 QEI 輸入。其基于硬件的故障檢測(cè)系統(tǒng)可更快地關(guān)閉系統(tǒng),無(wú)需軟件干預(yù)。這些 MCU 也可用于實(shí)施標(biāo)量和矢量控制技術(shù)。
隔離
TI 數(shù)字隔離器具有邏輯輸入和輸出緩沖器,這些緩沖器由 TI 的二氧化硅 (SiO2) 隔離勢(shì)壘進(jìn)行隔離,可提供 4kV 隔離。當(dāng)與隔離電源配合使用時(shí),這些器件可阻止高電壓、隔離接地以及防止噪聲電流進(jìn)入本地接地并干擾或損害敏感電路。
接口/連接
傳統(tǒng)模擬 RS-232/RS-485 接口一直是電機(jī)控制應(yīng)用的常見(jiàn)選擇。展望未來(lái),設(shè)計(jì)人員將在其產(chǎn)品中集成主流接口,如以太網(wǎng)、USB 和 CAN。
TI 致力于同時(shí)為傳統(tǒng)和新興工業(yè)接口提供解決方案。例如,TI 最近推出了全世界首款隔離式 CAN 收發(fā)器 ISO1050。
電源管理
德州儀器 (TI) 提供從標(biāo)準(zhǔn) IC 到高性能插件、變壓器、數(shù)字電源 MOSFET 和集成電源模塊的電源管理 IC 解決方案。從 AC/DC 和 DC/DC 電源、線性穩(wěn)壓器和非隔離式開(kāi)關(guān) DC/DC 穩(wěn)壓器到 PMIC 和電源及顯示解決方案,德州儀器 (TI) 的電源管理 IC 解決方案都能幫助您完成項(xiàng)目開(kāi)發(fā)。
五、電機(jī)控制 - 步進(jìn)電機(jī)
步進(jìn)電機(jī)是電機(jī)家族的“嬰兒”,20 世紀(jì) 60 年代早期才開(kāi)始流行。最初構(gòu)想是作為昂貴的位置控制應(yīng)用中伺服電機(jī)的低成本替代產(chǎn)品,而新興的計(jì)算機(jī)工業(yè)迅速將其采用到外設(shè)應(yīng)用當(dāng)中。步進(jìn)電機(jī)的主要優(yōu)勢(shì)在于能提供開(kāi)環(huán)位置控制,而成本只是需要反饋的伺服系統(tǒng)的幾分之一。在過(guò)去,步進(jìn)電機(jī)有時(shí)被誤稱(chēng)為“數(shù)字”電機(jī),因?yàn)樗鼈兂S谜环讲?qū)動(dòng)。但是,對(duì)這些電機(jī)的這種狹隘看法常常會(huì)在以后的項(xiàng)目開(kāi)發(fā)過(guò)程中導(dǎo)致大難題。步進(jìn)電機(jī)像其它磁“模擬”電機(jī)一樣產(chǎn)生扭矩。多數(shù)步進(jìn)電機(jī)的阻尼因數(shù)很低,導(dǎo)致一定步頻下的欠阻尼運(yùn)行和對(duì)諧振問(wèn)題的敏感度。這些問(wèn)題常常使步進(jìn)電機(jī)比其它電機(jī)拓?fù)涓y對(duì)付。
多數(shù)步進(jìn)電機(jī)采用雙凸極設(shè)計(jì),轉(zhuǎn)子和定子結(jié)構(gòu)上均有齒。如同 BLDC 或 PMSM 電機(jī),永久磁性位于轉(zhuǎn)子上,電磁包含在定子中。多數(shù)設(shè)計(jì)包含 2 個(gè)定子相位,由正交相位信號(hào)獨(dú)立驅(qū)動(dòng)。驅(qū)動(dòng)這些相位有許多方法,包括全步進(jìn)、半步進(jìn)或微步進(jìn),取決于使用的控制技術(shù)。每種情況下都會(huì)確定子磁通矢量,轉(zhuǎn)子上的磁性將嘗試與該矢量保持一致。由于轉(zhuǎn)子和定子的齒數(shù)不同,產(chǎn)生的移動(dòng)或步進(jìn)可能極小。對(duì)齊之后,定子電流立即按這種方式發(fā)生變化,以增加定子磁通矢量角度,從而使電機(jī)移動(dòng)到下一個(gè)步進(jìn)。由于多數(shù)應(yīng)用中沒(méi)有位置反饋,轉(zhuǎn)子磁通可以與定子磁通保持一致,這會(huì)產(chǎn)生無(wú)助于電機(jī)運(yùn)行的定子電流。因此,步進(jìn)電機(jī)沒(méi)有其它常用電機(jī)那樣有效。
由于多數(shù)步進(jìn)電機(jī)的步進(jìn)角相對(duì)較小,因此不是高速應(yīng)用的最佳選擇。某些應(yīng)用需要定子電流來(lái)完全更改每個(gè)步進(jìn)的極性。與定子線圈關(guān)聯(lián)的電感通常會(huì)阻止這種變化,電流達(dá)到新水平需要一段時(shí)間。步頻較高時(shí),電流再次變化之前可能無(wú)法完全達(dá)到穩(wěn)定狀態(tài)值。因此,驅(qū)動(dòng)相位的電壓必須以更快的速度增加,以使電流變化更快。但最終會(huì)達(dá)到增益遞減點(diǎn),此時(shí)就無(wú)法再進(jìn)行高速運(yùn)行。
如前所述,步進(jìn)設(shè)計(jì)因其固有的低阻尼因數(shù),常常受到共振問(wèn)題的困擾。這會(huì)增加可聞噪聲,嚴(yán)重情況下還會(huì)導(dǎo)致錯(cuò)誤步進(jìn)。為了消除這些問(wèn)題(并增加步進(jìn)分辨率),步進(jìn)繞線通常使用正弦波形驅(qū)動(dòng),而非方波。這時(shí),電機(jī)稱(chēng)為微步進(jìn)。在微步進(jìn)應(yīng)用中驅(qū)動(dòng)步進(jìn)的一種常用方法是,將每個(gè)線圈置于單獨(dú)的 H 橋電路中,然后利用處理器中的 PWM 調(diào)節(jié)正弦波形。但設(shè)計(jì)者必須記住,增加步進(jìn)分辨率不一定會(huì)增加步進(jìn)精度,尤其是在開(kāi)環(huán)應(yīng)用中。這由兩個(gè)因素造成:
實(shí)際與 指令轉(zhuǎn)子位置將受到電機(jī)負(fù)載影響,如步進(jìn)的靜態(tài)扭矩曲線所示。實(shí)際軸角可以與指令步進(jìn)角相差幾個(gè)微步進(jìn),具體取決于扭矩負(fù)載。
步進(jìn)角精度還受制造轉(zhuǎn)子和定子結(jié)構(gòu)的電機(jī)設(shè)計(jì)和容限的影響。用于微步進(jìn)應(yīng)用的步進(jìn)電機(jī)制造標(biāo)準(zhǔn)較高,因此較為昂貴。但是,微步進(jìn)仍常常與便宜的步進(jìn)電機(jī)配合使用,僅為提高共振敏感度。
方框圖
步進(jìn)電機(jī)系統(tǒng)的方框圖 (SBD),它具有微處理器、閘極驅(qū)動(dòng)器、隔離器件、工業(yè)接口和電源管理。
步進(jìn)電機(jī)
設(shè)計(jì)注意事項(xiàng)
步進(jìn)電機(jī)概述
步進(jìn)電機(jī)安裝有帶永久磁性的轉(zhuǎn)子,而定子至少具有兩個(gè)繞線。當(dāng)轉(zhuǎn)子磁性與定子繞線保持一致時(shí),將驅(qū)動(dòng)第二個(gè)繞線。兩個(gè)繞線交替開(kāi)啟和關(guān)閉,這將導(dǎo)致電機(jī)鎖定在想要的步進(jìn)位置。通過(guò)繞線的電流方向還可反向。
在帶有兩個(gè)定子繞線的步進(jìn)電機(jī)中,有四個(gè)步進(jìn)以 90° 隔開(kāi)。根據(jù)向定子繞線提供的脈沖,可精確控制步進(jìn)電機(jī)移動(dòng)的步進(jìn)。
步進(jìn)電機(jī)的速度控制可通過(guò)向繞線提供脈沖頻率實(shí)現(xiàn),而旋轉(zhuǎn)方向可通過(guò)反向脈沖序列進(jìn)行更改。電機(jī)內(nèi)部的極片有許多齒,有助于定位相對(duì)于定子的轉(zhuǎn)子位置。一些步進(jìn)電機(jī)的定子級(jí)也有齒。
根據(jù)使用的控制技術(shù),可全步進(jìn)、半步進(jìn)或微步進(jìn)控制步進(jìn)電機(jī)。簡(jiǎn)單的方形脈沖可以控制處于全步進(jìn)的電機(jī),而先進(jìn)控制技術(shù)(如脈寬調(diào)制 (PWM))可用于微步進(jìn)。
微處理器
基本 MSP430 MCU 與步進(jìn)控制驅(qū)動(dòng)器 IC(如 DRV8412)配合使用,能夠以極低的成本提供全步進(jìn)或高達(dá) 16 個(gè)微步進(jìn)。更復(fù)雜的步進(jìn)電機(jī)控制可通過(guò) Stellaris? 或 C2000? MCU 實(shí)現(xiàn)。板載外設(shè)(如 ADC 和 PWM)創(chuàng)建高度集成的解決方案,可滿足步進(jìn)電機(jī)的所有應(yīng)用要求。
接口/連接
傳統(tǒng)模擬 RS-232/RS-485 接口一直是電機(jī)控制應(yīng)用的常見(jiàn)選擇。展望未來(lái),設(shè)計(jì)人員將在其產(chǎn)品中集成主流接口,如以太網(wǎng)、USB 和 CAN。
TI 致力于同時(shí)為傳統(tǒng)和新興工業(yè)接口提供解決方案。例如,TI 最近推出了全世界首款隔離式 CAN 收發(fā)器 ISO1050。
電源管理
德州儀器 (TI) 提供從標(biāo)準(zhǔn) IC 到高性能插件、變壓器、數(shù)字電源 MOSFET 和集成電源模塊的電源管理 IC 解決方案。
從 AC/DC 和 DC/DC 電源、線性穩(wěn)壓器和非隔離式開(kāi)關(guān) DC/DC 穩(wěn)壓器到 PMIC 和電源及顯示解決方案,德州儀器 (TI) 的電源管理 IC 解決方案都能幫助您完成項(xiàng)目開(kāi)發(fā)。
-------------------------------------------------------------------------
想了解關(guān)于電機(jī)驅(qū)動(dòng)方面的最新算法和最理想的方案嗎?想為您的電機(jī)驅(qū)動(dòng)找到更合適的方案以適應(yīng)工業(yè)自動(dòng)化系統(tǒng)的新挑戰(zhàn)嗎?趕快報(bào)名參與電子發(fā)燒友網(wǎng)舉辦的賽靈思研討會(huì)——取代傳統(tǒng)MCU方案:用All Programmable技術(shù)提升工業(yè)自動(dòng)化系統(tǒng)的效率和性能,內(nèi)容精彩,絕對(duì)不容錯(cuò)過(guò)!



















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論