 電子發(fā)燒友App
電子發(fā)燒友App


?
?在對(duì)精度有要求的運(yùn)動(dòng)控制應(yīng)用中,有很多伺服電機(jī)和設(shè)備執(zhí)行器都可以滿(mǎn)足其要求,但是完整控制系統(tǒng)的選型、設(shè)計(jì)和集成對(duì)于運(yùn)動(dòng)控制的可重復(fù)性和精度十分關(guān)鍵。盡管相對(duì)于有競(jìng)爭(zhēng)關(guān)系的技術(shù)而言,伺服電機(jī)有很多優(yōu)點(diǎn),但是在應(yīng)用時(shí)還必須考慮一系列的因素。
高精度伺服系統(tǒng)運(yùn)動(dòng)控制的典型應(yīng)用包括:印刷設(shè)備、旋轉(zhuǎn)填料機(jī)、取放型機(jī)器人、實(shí)驗(yàn)或組裝操作、鉆孔、切削、攻絲以及其它在單軸或多軸運(yùn)動(dòng)中使用的簡(jiǎn)單索引移動(dòng)控制等類(lèi)似應(yīng)用。
伺服系統(tǒng)一般用于控制負(fù)載。對(duì)于伺服來(lái)講,為了完成系統(tǒng)所需的負(fù)載控制功能,必須選取合適的型號(hào)。為了保證整個(gè)系統(tǒng)能夠按照設(shè)計(jì)要求工作,伺服系統(tǒng)必須提供所需的力矩、速度、精度。
負(fù)載類(lèi)型、機(jī)械傳動(dòng)方式、系統(tǒng)工作周期(啟動(dòng)和停機(jī)的頻率)、運(yùn)行期間系統(tǒng)所需的速度、系統(tǒng)所需的精度,都是在進(jìn)行系統(tǒng)選型時(shí)應(yīng)該考慮的因素。
伺服控制的優(yōu)勢(shì)
對(duì)于要求精準(zhǔn)控制運(yùn)動(dòng)的應(yīng)用,有很多方案可供選擇,包括帶變頻驅(qū)動(dòng)的直流電機(jī)和交流電機(jī)、步進(jìn)電機(jī)和伺服電機(jī)。
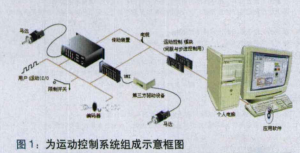
圖1 這種伺服電機(jī)和驅(qū)動(dòng)裝置可以為一系列廣泛的運(yùn)動(dòng)控制引用提供精確的定位。利用伺服驅(qū)動(dòng)和內(nèi)部的“索引器”,最多可以預(yù)先配置8個(gè)索引運(yùn)動(dòng),并安裝到驅(qū)動(dòng)器中,然后就可以通過(guò)來(lái)自PLC或PAC的開(kāi)關(guān)量輸入進(jìn)行選擇和執(zhí)行相應(yīng)的運(yùn)動(dòng)。本文所有圖片來(lái)源:AutomationDirect
從定位、速度,和力矩控制精度方面來(lái)講,伺服系統(tǒng)提供了可能是最高水平的性能。相較于低成本的步進(jìn)電機(jī)系統(tǒng),伺服系統(tǒng)在更高的轉(zhuǎn)速下(最高可達(dá)5,000轉(zhuǎn)/分鐘)仍可以提供更大的力矩。步進(jìn)電機(jī),最大力矩發(fā)生在零轉(zhuǎn)速時(shí),而伺服電機(jī)的最大力矩發(fā)生在更高的轉(zhuǎn)速。用于設(shè)備控制的典型伺服系統(tǒng),所能提供的功率范圍也比步進(jìn)電機(jī)更大,可達(dá)3千瓦或更多。
也許,步進(jìn)電機(jī)和伺服電機(jī)之間最顯著的不同在于:伺服電機(jī)利用閉環(huán)控制改進(jìn)了定位精度。盡管某些步進(jìn)電機(jī)裝置也具有閉環(huán)控制功能,但是能夠?qū)崿F(xiàn)精確和高速的運(yùn)動(dòng)控制,并且沒(méi)有諸如電機(jī)停止以及定位錯(cuò)誤等問(wèn)題,仍然是伺服電機(jī)的普遍優(yōu)勢(shì)。閉環(huán)位置控制、更高的力矩和更高的速度,使得伺服電機(jī)在高精度應(yīng)用場(chǎng)合具有更大的優(yōu)勢(shì)。
相較于具有變頻驅(qū)動(dòng)的直流電機(jī)和交流電機(jī),伺服電機(jī)在轉(zhuǎn)速、高峰值力矩和加速度方面具有非常明顯的優(yōu)勢(shì)。伺服電機(jī)可以將轉(zhuǎn)速精確的控制在5,000轉(zhuǎn)/分鐘或更高。其閉環(huán)定位能力也遠(yuǎn)遠(yuǎn)的超過(guò)變頻電機(jī)和驅(qū)動(dòng)設(shè)備的典型定位功能。伺服系統(tǒng)還能運(yùn)行在純力矩模式下,這時(shí)系統(tǒng)提供特定的力矩而不需考慮定位或轉(zhuǎn)速。這是各種繞線(xiàn)操作的一般需求。
精確運(yùn)動(dòng)控制的8個(gè)關(guān)鍵因素
升級(jí)換代現(xiàn)有伺服系統(tǒng)時(shí),功率大小一般不變,即使電機(jī)的物理大小并不一致。當(dāng)為新應(yīng)用選擇伺服系統(tǒng)時(shí),可以利用選型軟件來(lái)幫助選擇,包括利用數(shù)學(xué)公式來(lái)確定負(fù)載的慣量、關(guān)鍵參數(shù)等。相關(guān)組件需要經(jīng)過(guò)選擇、設(shè)計(jì)、安裝和測(cè)試,從而設(shè)計(jì)出一套伺服系統(tǒng)。
精確運(yùn)動(dòng)控制的8個(gè)關(guān)鍵組件: 1.伺服電機(jī) 2.編碼器反饋 3.電機(jī)驅(qū)動(dòng) 4.變速箱 5.執(zhí)行器 6.運(yùn)動(dòng)控制器 7.驅(qū)動(dòng)器通訊硬件 8.控制和調(diào)節(jié)軟件
在設(shè)計(jì)中,伺服電機(jī)、編碼器反饋以及伺服驅(qū)動(dòng)器(有時(shí)候被稱(chēng)為放大器),必須將其設(shè)計(jì)成按照一個(gè)整體協(xié)同工作,使之與電機(jī)和負(fù)載匹配。
必須慎重考慮執(zhí)行器的類(lèi)型和材料選擇。在某些應(yīng)用場(chǎng)合,例如,在精確運(yùn)動(dòng)應(yīng)用中,鋁制握柄傳動(dòng)器就有些過(guò)于柔軟,因此應(yīng)當(dāng)考慮剛性更大的材料或增加支撐結(jié)構(gòu)。
對(duì)于高性能系統(tǒng),負(fù)載的反射慣量,包括任何變速箱和執(zhí)行器的慣量,應(yīng)當(dāng)盡可能的保持在較低水平(理想情況下需要與電機(jī)慣量保持在1:1的水平),但是,一般情況下,在慣量失配比高達(dá)5:1甚至是10:1的時(shí)候,其運(yùn)行性能仍然可以接受。
選擇好合適的伺服系統(tǒng)和執(zhí)行器,就可以確定用于調(diào)試和控制的運(yùn)動(dòng)控制器和相關(guān)軟件了。不管是單軸運(yùn)動(dòng)還是多軸運(yùn)動(dòng)系統(tǒng),對(duì)于運(yùn)動(dòng)性能的要求,比如最大速度、加速度變化率(加速度的變化)、總行程、負(fù)加速度等必須加以審慎考慮,以便取得應(yīng)用項(xiàng)目的成功。
變速箱和執(zhí)行器的選擇
如果需要齒輪減速,相較于大多數(shù)其它齒輪減速裝置來(lái)講,精密行星式齒輪減速箱可以提供更好的精度和可重復(fù)性,并且它具有較高的效率,可以從伺服系統(tǒng)獲得最大的功率。變速箱可以降低負(fù)載的反射慣量,數(shù)值等于傳動(dòng)比的平方。
如果某個(gè)應(yīng)用需要在高速狀態(tài)下實(shí)現(xiàn)減速,則減速箱是一個(gè)很好的選擇,它可以改進(jìn)系統(tǒng)的整體性能。在某些應(yīng)用場(chǎng)合,利用減速箱可以倍增系統(tǒng)可用力矩的數(shù)量,從而可以使用較小的電機(jī)和驅(qū)動(dòng)裝置,從而節(jié)省大量成本。
但是減速箱會(huì)將自身的反射慣量疊加到系統(tǒng)上,從而會(huì)引入一些反沖。大多數(shù)精密減速箱的反沖都比較小,但是設(shè)計(jì)人員需要意識(shí)到這個(gè)問(wèn)題,并對(duì)由此所產(chǎn)生的定位錯(cuò)誤采取適當(dāng)措施。
當(dāng)與行星式減速箱配合使用時(shí),伺服系統(tǒng)可以與各種類(lèi)型的執(zhí)行器連接,提供精確的位置控制,但有一個(gè)前提條件:所有這些設(shè)備都必須是精心選擇,并且相互匹配的。盡管可以從不同的供應(yīng)商那里分別購(gòu)買(mǎi)伺服驅(qū)動(dòng)裝置、伺服電機(jī)以及行星式減速箱,但是并不推薦這樣做,因?yàn)檫@需要大量的調(diào)研、設(shè)計(jì)和分析,以確保所有的設(shè)備都是配套的。
圖2 在很多需要高精度定位或高力矩應(yīng)用場(chǎng)合,行星式減速器和伺服電機(jī)配合工作良好。
從同一個(gè)供應(yīng)商處采購(gòu)所有設(shè)備,尤其是那些經(jīng)過(guò)仔細(xì)匹配的設(shè)備,具有多重優(yōu)點(diǎn)。供應(yīng)商已經(jīng)完成了所有的研究工作,可以為用戶(hù)確保兼容性。大多數(shù)供應(yīng)商還可為這種采購(gòu)提供更優(yōu)惠的質(zhì)保,供應(yīng)商還可提供連接這些設(shè)備所需的、經(jīng)認(rèn)證的硬件和電纜。
在線(xiàn)選型工具
某些供應(yīng)商提供了在線(xiàn)選型工具,可以用于選擇伺服系統(tǒng)以及配套的減速箱,減少設(shè)計(jì)工作。在線(xiàn)選擇指導(dǎo)對(duì)設(shè)計(jì)提供幫助,還能為某些緊密連接、相互配套、可以作為一個(gè)系統(tǒng)來(lái)采購(gòu)的設(shè)備提供某些建議。
一般情況下,選擇工具會(huì)要求設(shè)計(jì)人員輸入轉(zhuǎn)速和力矩,接著就自動(dòng)提供一系列可供選擇的電機(jī)-減速箱組合。工程師可以輸入以公制或英制力矩?cái)?shù)據(jù),或者設(shè)計(jì)人員可以選擇特定的伺服電機(jī)型號(hào)。設(shè)計(jì)人員輸入單個(gè)數(shù)據(jù)或者選擇一個(gè)傳動(dòng)比。最后,工程師就可以選擇合適的物理結(jié)構(gòu)形式:直線(xiàn)或者直角齒輪,或者是兩者都有。
系統(tǒng)清單包括價(jià)格信息,很多情況下對(duì)于選擇過(guò)程來(lái)講,價(jià)格是一個(gè)關(guān)鍵因素。選擇完電機(jī)/減速箱組合后,設(shè)計(jì)人員就可以審查所選伺服系統(tǒng)、減速箱以及兩者組合體的完整規(guī)格書(shū)了。
更先進(jìn)的選擇工具,可以為伺服電機(jī)的選擇提供幫助。有些應(yīng)用程序可以幫助設(shè)計(jì)人員為某個(gè)特定工程選擇最優(yōu)電機(jī)。軟件能夠計(jì)算所需的轉(zhuǎn)速和力矩,并且驗(yàn)證系統(tǒng)的其它需求,比如頂端速度、加速度和慣量不匹配等。
利用軟件,設(shè)計(jì)工程師能夠?qū)C(jī)械系統(tǒng)進(jìn)行建模,包括導(dǎo)螺桿、同步皮帶、減速箱等諸如此類(lèi)的部件。一旦模型化,軟件就可以為給定機(jī)械裝置布局,推薦最優(yōu)的電機(jī)。軟件可以根據(jù)客戶(hù)的應(yīng)用規(guī)格書(shū)來(lái)計(jì)算力矩、速度和慣量需求;處理來(lái)自數(shù)據(jù)庫(kù)的電機(jī)數(shù)據(jù);創(chuàng)建滿(mǎn)足需求的清單。軟件提供最優(yōu)的電機(jī),供客戶(hù)從清單中進(jìn)行選擇。
內(nèi)部或外部控制?
大多數(shù)伺服系統(tǒng)能夠接收來(lái)自于外部控制器的傳統(tǒng)運(yùn)動(dòng)指令,比如可編程邏輯控制器(PLC)和可編程自動(dòng)控制器(PAC),而且某些驅(qū)動(dòng)裝置也具有提供內(nèi)部運(yùn)動(dòng)控制的能力。利用伺服驅(qū)動(dòng)和內(nèi)部的“索引器”,最多可以預(yù)先配置8個(gè)索引運(yùn)動(dòng),并安裝到驅(qū)動(dòng)器中,然后就可以通過(guò)來(lái)自PLC或PAC的開(kāi)關(guān)量輸入進(jìn)行選擇和執(zhí)行相應(yīng)的運(yùn)動(dòng)。
利用串口協(xié)議,從外部控制器就可以發(fā)送指令,啟動(dòng)甚至是改變這些預(yù)定義索引文件。運(yùn)動(dòng)指令可以是增量或者是絕對(duì)值,加速度可以是線(xiàn)性或S型曲線(xiàn)。很多應(yīng)用都從調(diào)整加速度或者選擇S型曲線(xiàn)的運(yùn)動(dòng)模式中獲益,因?yàn)檫@可以降低在運(yùn)動(dòng)過(guò)程中的位置過(guò)調(diào)。
有很多種方式可以實(shí)現(xiàn)從外部控制器來(lái)控制伺服驅(qū)動(dòng)裝置。RS485/RS422 和Modbus串口通信是非常典型的、用于將運(yùn)動(dòng)指令傳遞給驅(qū)動(dòng)器的通訊協(xié)議。指令在驅(qū)動(dòng)器內(nèi)執(zhí)行并完成閉環(huán)控制。驅(qū)動(dòng)器還可以由高速脈沖和方向信號(hào)來(lái)控制,或者由與速度或力矩成比例的模擬量電壓來(lái)控制。驅(qū)動(dòng)和伺服電機(jī)也能跟隨外部的解碼器信號(hào)指令動(dòng)作。
以上每種方式都會(huì)影響伺服系統(tǒng)的精度。教科書(shū)上所教的模擬量電壓信號(hào)也許沒(méi)有新式數(shù)字控制方式,比如內(nèi)部控制或外部脈沖和方向信號(hào)更精確。系統(tǒng)的分辨率可以通過(guò)數(shù)字驅(qū)動(dòng)指令方案來(lái)進(jìn)行計(jì)算,應(yīng)當(dāng)對(duì)其進(jìn)行檢查以確保能夠滿(mǎn)足系統(tǒng)整體精度的需求。
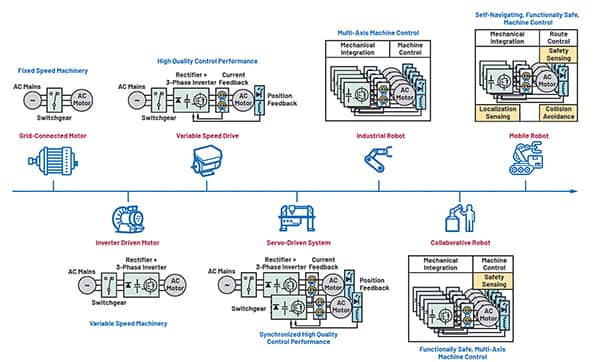
當(dāng)使用外部運(yùn)動(dòng)控制器作為主控制器時(shí),多個(gè)驅(qū)動(dòng)裝置可以通過(guò)驅(qū)動(dòng)器的串口,以菊花鏈形式連接和尋址。這就可以為不需精確路徑控制的多軸過(guò)程提供非常簡(jiǎn)單而又強(qiáng)大的控制功能,僅需準(zhǔn)確的開(kāi)始和停止點(diǎn)(圖3)。
圖3 對(duì)于連續(xù)運(yùn)動(dòng)的組合裝置,這個(gè)三軸系統(tǒng)的伺服和驅(qū)動(dòng)裝置可以提供精確的協(xié)調(diào)運(yùn)動(dòng)。選擇伺服系統(tǒng)及其配套減速箱的在線(xiàn)工具包括AutomationDirect公司的SureGear在線(xiàn)選型器。
伺服系統(tǒng)編程
無(wú)論是外部運(yùn)動(dòng)控制器還是內(nèi)部控制器驅(qū)動(dòng),運(yùn)動(dòng)控制軟件及其特性和功能對(duì)于整個(gè)系統(tǒng)的精度影響很大。對(duì)于具有板載索引器和自適應(yīng)調(diào)節(jié)模式的驅(qū)動(dòng)器來(lái)講,必須對(duì)其進(jìn)行適當(dāng)?shù)呐渲茫缤獠窟\(yùn)動(dòng)控制器也需要適當(dāng)?shù)呐渲靡粯印?/p>
當(dāng)需要高動(dòng)態(tài)響應(yīng)時(shí),應(yīng)該對(duì)伺服系統(tǒng)進(jìn)行精心調(diào)節(jié),一般需要和負(fù)載連接。無(wú)論是使用自適應(yīng)調(diào)節(jié)軟件或者是編程人員手動(dòng)調(diào)節(jié),精準(zhǔn)的調(diào)節(jié)都可以實(shí)現(xiàn)快速移動(dòng),最大程度的降低海綿狀運(yùn)動(dòng),同時(shí)可以降低過(guò)調(diào)或移動(dòng)結(jié)束后的振動(dòng)。
驅(qū)動(dòng)配置軟件可以提供驅(qū)動(dòng)參數(shù)的配置、自動(dòng)調(diào)節(jié)算法和工具,可以幫助大多數(shù)應(yīng)用尋找最優(yōu)設(shè)置。
一旦驅(qū)動(dòng)器配置并調(diào)節(jié)完成,就可以編程實(shí)現(xiàn)運(yùn)動(dòng)軌跡。S型-曲線(xiàn)加速度圖,相較于不規(guī)則四邊形(線(xiàn)性)位移,可以提供更好的定位精度,更小超調(diào)量,在具有邊界調(diào)節(jié)的伺服系統(tǒng)中更是如此。這些標(biāo)準(zhǔn)運(yùn)動(dòng)模式的能力可以改進(jìn)精度,減少系統(tǒng)沖擊和振動(dòng)。
某些時(shí)候,執(zhí)行器的控制序列會(huì)影響精度。比如,在降低反沖以及相關(guān)的定位錯(cuò)誤時(shí)常用的一個(gè)方法就是從公共方向到達(dá)多個(gè)目的位置。在需要逆向移動(dòng)的場(chǎng)合,有些設(shè)計(jì)人員將其設(shè)計(jì)成:負(fù)載移動(dòng)到目的位置后,并不停止,然后調(diào)轉(zhuǎn)方向,從公共位置移動(dòng)到期望的位置。
選擇恰當(dāng)?shù)乃欧到y(tǒng)、減速箱和驅(qū)動(dòng)器組合,有助于應(yīng)對(duì)各種各樣的精密自動(dòng)化挑戰(zhàn)。
編輯:黃飛











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論