一文簡析TC3xx Rest/Clock/Watch模塊
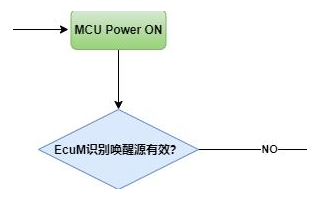
在時鐘系統部分主要介紹時鐘源選擇,PLL倍頻配置,時鐘分發等內容。在看門狗模塊部分主要介紹了開門狗復....
Canalyzer使用介紹
database management:添加database,只有添加了database后,cana....
什么是canalyzer?Canalyzer使用介紹
打開canalyzer工程左上方閃電標志是啟動和暫停作用。panel是可用于添加panel界面,有助....
汽車嵌入式軟件自動化測試的方法及推薦工具
宏控UTP協同自動化測試系統(以下簡稱UTP測試系統)是一款通用的自動化測試系統,支持全仿真和部分仿....
聊一聊汽車控制器的啟動——BOOT
你有沒有遇到過電腦新安裝了軟件,然后提示你Reboot的場景?這里的Reboot,大家都知道是重啟,....
AUTOSAR LIN通信協議棧怎么保證NM報文先發送的?
Lin報文的周期發送是通過調度表實現的,而Lin調度表存在于LinIf模塊,LinIf模塊在周期調用....
以智駕系統功能開發講解智駕底軟如何驅動功能開發
對智能駕駛系統的研發流程上講,一直希望從頂層系統架構開始到底層之間一次性講清整個智駕系統是如何進行信....
智駕系統的研發給傳統新能源汽車帶來了哪些福音
實際上滑行能量回收與制動能量回收是兩種不同的能量回收形式。比如當某個或某幾個車輪打滑時,ESP一定要....
在ETAS的AUTOSAR中實現Spinlock的設計
現在的車載控制器,多核的MCU用的是越來越多了,對于不同核之間的共享數據保護,也是必須的,其中Spi....
從自動泊車看汽車智能化發展
搭載有自動泊車功能的汽車可以不需要人工干預,通過車載傳感器、處理器和控制系統的幫助就可以實現自動識別....
車身控制器的各個功能規范介紹
之前有段時間寫過幾篇幾個車載控制器的功能介紹,其中有一篇就是車身控制器的功能介紹(回看戳:談談車身控....
自動駕駛仿真測試平臺干貨內容梳理
環境感知傳感器仿真是自動駕駛系統仿真測試中至關重要一部分,主要包括:攝像頭仿真、激光雷達仿真、毫米波....
自動駕駛域控制器開發和量產的挑戰
傳統的汽車電子電氣架構都是分布式的,汽車里的各個ECU都是通過CAN和LIN總線連接在一起,現代汽車....
DDS測試策略探討與協議測試工具介紹
這種情況下ECU和殘余系統的交互實現方案相對來說是標準化的,如CAN/LIN等總線信號以及I/O信號....
小鵬P7的熱管理系統詳解
高溫時, 依靠電池換熱器, 靠制冷劑給電池強制冷卻。中溫時, 依靠四通換向閥將電池回路與電驅回路串聯....
使用candb++制作dbc文件筆記
今天又來分享一篇工具使用的文章,candb++的工具,也是Vector的,用來制作、編輯或者是查看d....
大眾ID4.X內部ECU技術細節整理
最近一直在寫不同車型的技術相關的文章,前幾天寫了蔚來EC6和比亞迪海豹的,今天來分享一下大眾ID.4....
一名智能駕駛產品經理的自我修養
在了解智駕產品經理的工作內容之前,我們需要先知道,目前智能駕駛功能開發的常規流程。需要說明的是,目前....
中國汽車芯片4大挑戰和6條建議
“現在,汽車芯片國內供給度不到10%,也就是每一輛汽車90%以上芯片都是進口或者在外資本土公司手中。....
2021款蔚來EC6的網絡架構技術信息及發展
蔚來EC6中,主要使用了CAN/LIN/Eth三種總線,其中CAN是主力,LIN主要用于燈光、門、窗....
汽車電子ECU環境的零、UDS診斷命令備忘錄
UDS(Unified Diagnostic Services,統一的診斷服務)診斷協議是在汽車電子....
自動駕駛SOTIF落地的思考與展望
補充幾句:SOTIF同樣適用于非ADAS的EE功能,如:假設電動車窗防夾力設計200N,當車窗開關被....
域控制器功能安全概念階段開發學習
危害分析和風險評估主要包括失效模式識別、 危害識別、 場景分析、危害事件分析、ASIL 評估、確定安....
動力域控制器功能安全概念階段需要做哪些
相關項主要包括控制器功能需求,非功能需求,法律法規要求,環境要求和控制器接口等內容,那相關項定義就很....
超異構芯片Super SOC TDA4的設計、啟動及工作原理
對于超異構芯片而言,一般是基于異構、可擴展的架構開發,多核異構的優點是各核充分發揮其處理效能的優點,....
淺析第一性原理談安全性和可靠性
理解了失效發生的原因,可以得出如果想要避免失效,那么就要找到引起失效的故障原因,存在兩個類型的故障,....
《中國汽車基礎軟件信息安全研究報告1.0》正式發布
百年汽車,歷經演變。汽車已經從一個交通工具演變成一個移動智能終端、大數據交互平臺、分布式儲能單元和分....





 工商網監
工商網監