 方向控制中舵機值及限幅
方向控制中舵機值及限幅

舵機中值及限幅
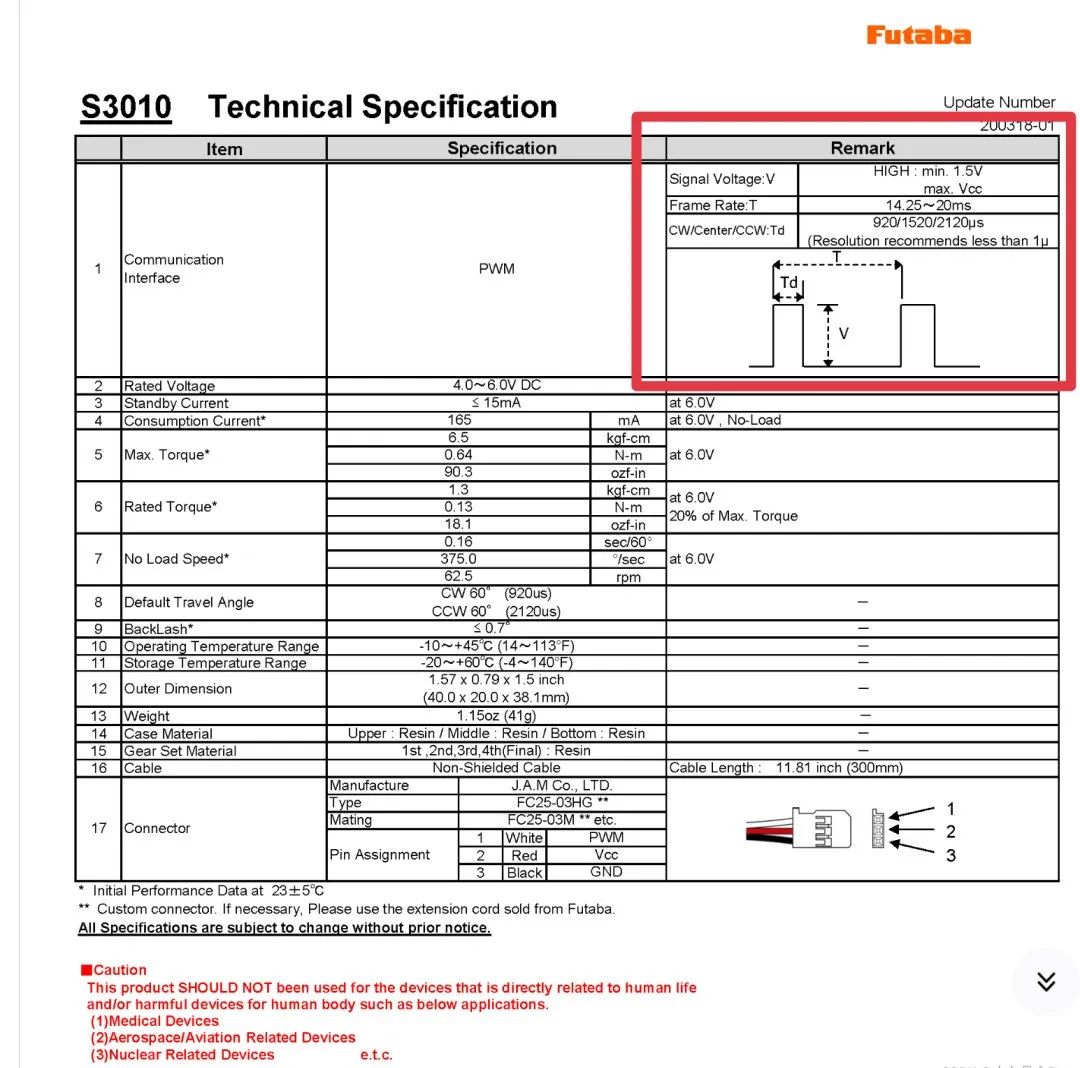
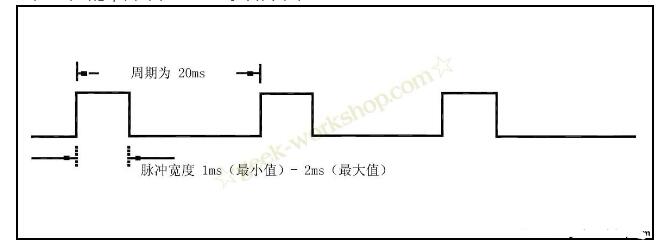
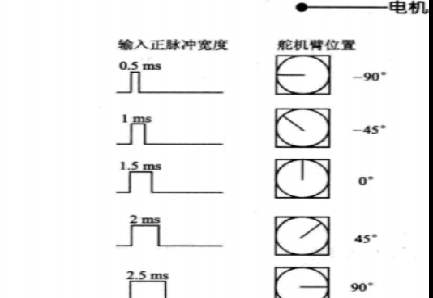
S3010舵機位于理論中值時一個周期的高電平時間應該為1.52ms由此可得占空比為7.6%,由此可以推算出單片機的對應占空比值,假設pwm時鐘頻率為30Mhz
則:計時20ms需要計數30 000 000/1000×20=600 000次
Duty= 7.6%×周期為10ms時的總計數值 (一個周期需要計數300 000次)
則舵機理論中值對應的PWM高電平計數個數為:Duty_mid=45 600;
注意一定是讓舵機到達理論中值后再安裝轉向機構,還需要借助按鍵找出舵機的左右極限值,并且在程序內部要寫限幅,保護舵機避免被燒。
舵機初始化及輸出控制函數。
/*******************************************************************************
* 函數名 :Steering_Init
* 描述 :舵機初始化
* 參數 :
freq PWM頻率(10Hz-3MHz)
angl
*******************************************************************************/
void Steering_Init(uint32 freq, int16 angl)
{
pwm_init(PWMB_CH1_P74,freq,angl); //PWMA初始化
}
轉向控制
根據控制器計算的控制量,通過一定比例給到舵機的PWM輸出,從而實現舵機的打角 代碼。
//轉向限制幅度
if(Price_PWM >=500) Price_PWM=500;
if(Price_PWM<=-500) Price_PWM=-500;
Steering_Angl(Price_PWM/2);//輸出到舵機打角
被控對象與被控量
整個方向控制系統的被控對象是小車的轉向機構,也就是舵機和左右驅動輪,而被控量就是小車的前進角度。
反饋對象與反饋量
在方向控制系統中,反饋對象是攝像頭和電磁模塊,而對應的反饋量是電感值和前瞻中心值。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
智能車
+關注
關注
21文章
409瀏覽量
77572 -
舵機
+關注
關注
17文章
298瀏覽量
41967
發布評論請先 登錄
相關推薦
熱點推薦
小車電機和舵機控制相關資料分享
本文鏈接地址:小車電機和舵機控制通過運動學方程,從Move_X, Move_Y, Move_Z中求解出阿克曼小車電機MOTOR_A,MOTOR_B的目標速度值和
發表于 07-05 06:01
STM32控制舵機
端口輸出PWM,實現控制舵機。我們這里就拿180°的SG90舵機。一、PWMPWM是什么?PWM,英文名Pulse Width Modulation,是脈沖寬度調制縮寫,它是通過對一系列脈沖的寬度進行調制,等效出所需要的波形(包
發表于 08-04 06:26
數字舵機控制原理是什么_數字舵機與模擬舵機的區別
數字舵機(Digital Servo)和模擬舵機(Analog Servo)在基本的機械結構方面是完全一樣的,主要由馬達、減速齒輪、控制電路等組成,而數字舵機和模擬
舵機轉速與電壓之間的關系
來源:電子森林 舵機 在自動控制場合被廣泛應用。舵機的輸出力矩、轉動速度、命令更新頻率等標準了舵機的工作性能。在 全國大學生智能車競賽中 ,

智能車方向控制舵機PWM技術
舵機 舵機是一種位置(角度)伺服的驅動器,我們可以通過給信號腳不同的占空比來讓舵機進行打角進而控制小車方向。 例如C車的S3010
舵機在無人機中的作用
隨著科技的飛速發展,無人機已經成為現代生活中不可或缺的一部分。它們在軍事、商業和個人娛樂等多個領域發揮著重要作用。在無人機的眾多組件中,舵機扮演著至關重要的角色。 舵機的基本功能 1.





 工商網監
工商網監
評論