 HPM6750測評|體驗極致的運行速度和開發速度
HPM6750測評|體驗極致的運行速度和開發速度

在HPM6750上使用RT-Thread驅動SD卡實現文件讀寫只需要三步:
編譯項目代碼
燒錄二進制到開發板
PS:本篇內容特點——實操性強,異常簡單,有手就行。
一、準備工作
1.1 準備好開發板和SD卡
開始本篇實驗之前,需要準備一個MicroSD卡,我這里準備的是一個32G的鎧俠藍卡:

1.2 創建RT-Thread項目
首先,使用RT-Thread Studio創建名為hpm_sdio_test的項目:
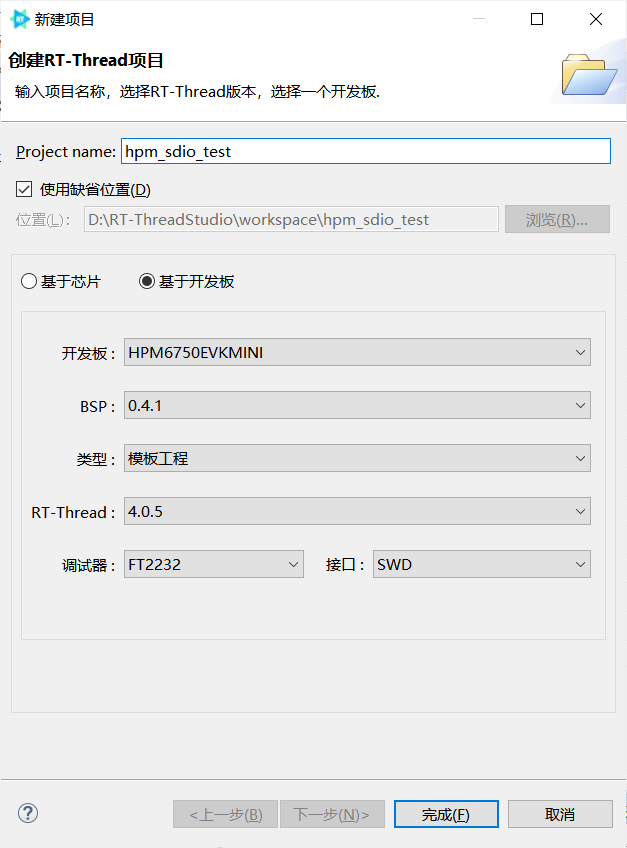
注:如果已有RT-Thread項目,則可以跳過此步驟。
二、配置RT-Thread
這里僅以RT-Thread Studio為例,對RT-Thread進行配置。除此之外,使用RT-Thread的Env工具,在命令行環境下進行相關配置也是可以的。
2.1 打開FATFS和SDIO組件
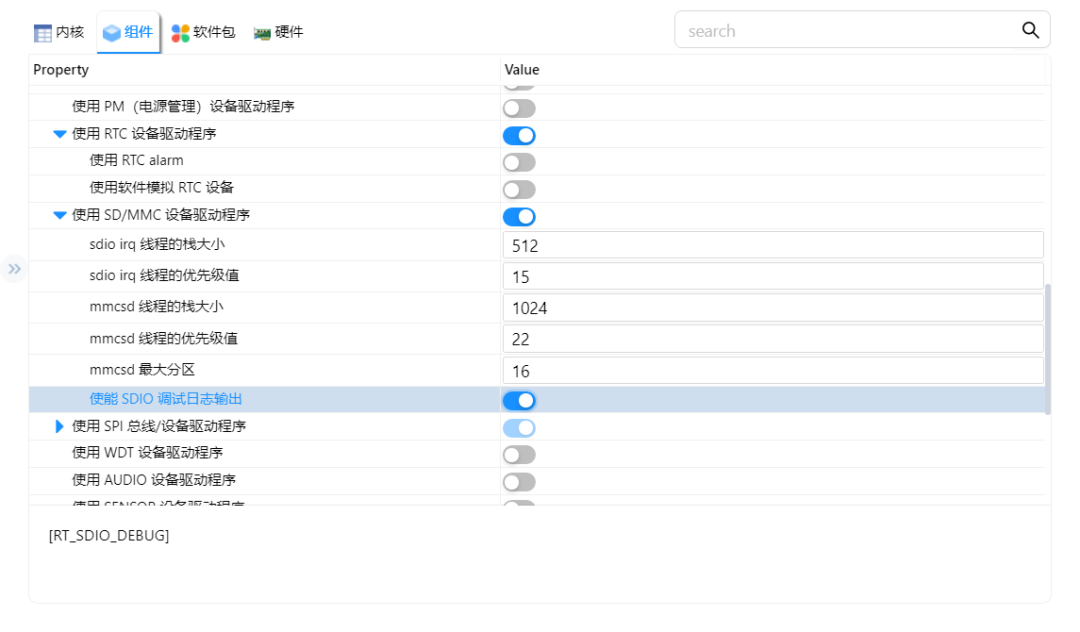
創建項目后,打開RT-Thread Settings,開啟FATFS和SDIO配置:

可以看到,打開的組件,圖標顯示為彩色。這里的SDIO屬于RT-Thead驅動框架的SDIO部分。
為了方便觀察實驗現象,這里最好再打開SDIO組件的調試日志:
圖中頂欄的幾個部分,對于RT-Thread Studio創建的RT-Thread項目,通常而言:
內核欄中的屬于內核組件配置,相關源碼位于rt-thread子目錄;
組件欄中的屬于系統組件配置,相關源碼位于rt-thread/components子目錄;
軟件包欄中的屬于三方組件配置,相關源碼默認不在項目中;在打開相應配置并保存后,才會下載到項目的packages子目錄;
硬件欄中的屬于BSP配置,相關源碼通常在board子目錄。
2.2 打開SDIO驅動
前面打開的僅是SDIO驅動框架,要使用SDIO功能,還需要打開HPM開發板的SDXC驅動:
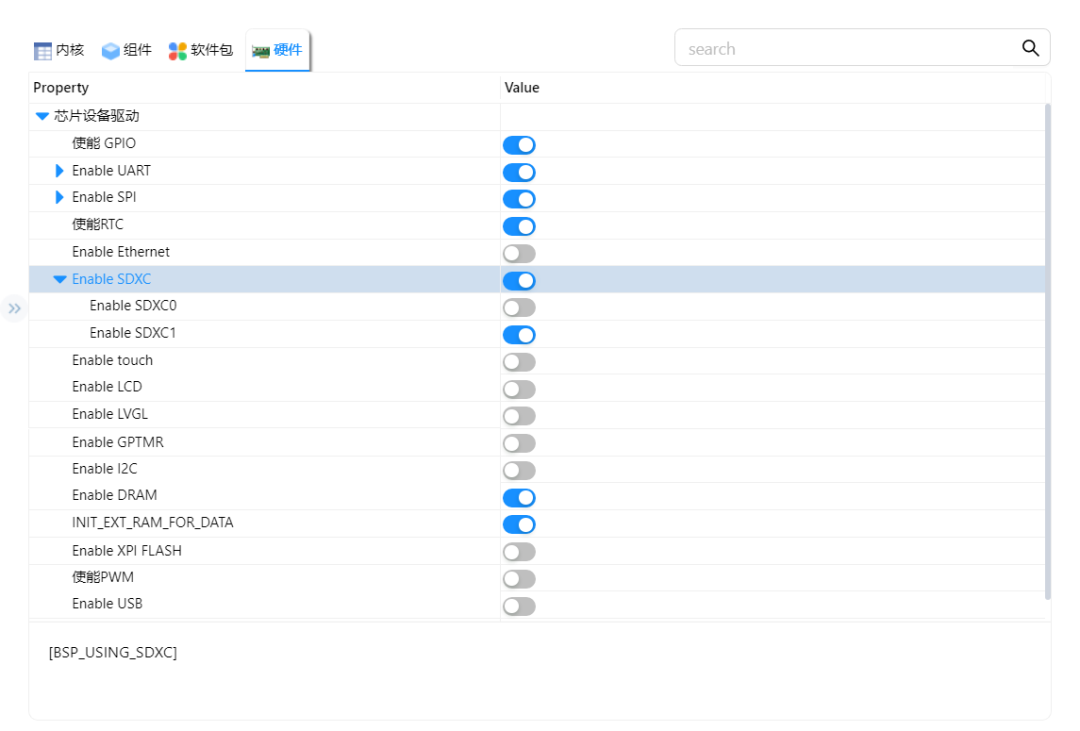
修改完成,Ctrl+S保存修改。
三、編譯、燒錄、運行
3.1 編譯項目代碼
完成上面的配置工作后,Ctrl+B編譯項目:
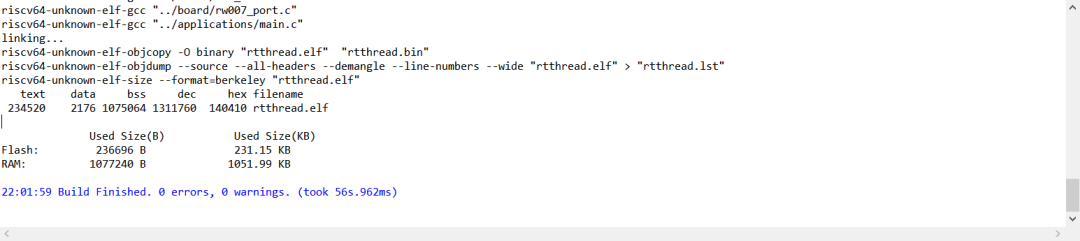
編譯完成后,可以在控制臺看到Flash和RAM占用情況。
3.2 燒錄程序
編譯成功后,我們需要將生成的二進制程序代碼文件燒錄到開發板上。
開始測試之前,我們需要先將MicroSD卡插入開發板(RT-Thread目前還不支持SD卡熱插拔):

插入SD卡后,將開發板通過USB線連接到PC。
此時,我們可以看到,正面的SD卡指示燈已經亮起了:

3.3 運行程序
接著,回到RT-Thread Studio,用Ctrl+Alt+D快捷鍵,將編譯好的程序燒錄到開發板上。
燒錄完成后,我們就可以在串口終端看到——已經檢查到sd卡了:
可以看到,RT-Thread版本信息已經打印出來了,同時看到了熟悉的msh提示符。
基于RT-Thread的項目默認情況下開啟了msh,并且將UART0串口初始化為console輸入輸出。因此,我們可以在串口中斷軟件中,輸入msh支持的命令,查看命令的輸出。
四、在msh中操作SD卡
燒錄完成后,我們就可以在RT-Thread的msh環境中愉快地操作SD卡了。本節我將在串口終端中演示——如何在HPM6750開發板上使用RT-Thread提供的文件系統、目錄、文件操作相關命令。
首先,我們可以通過help命令查看此時msh中支持哪些命令:
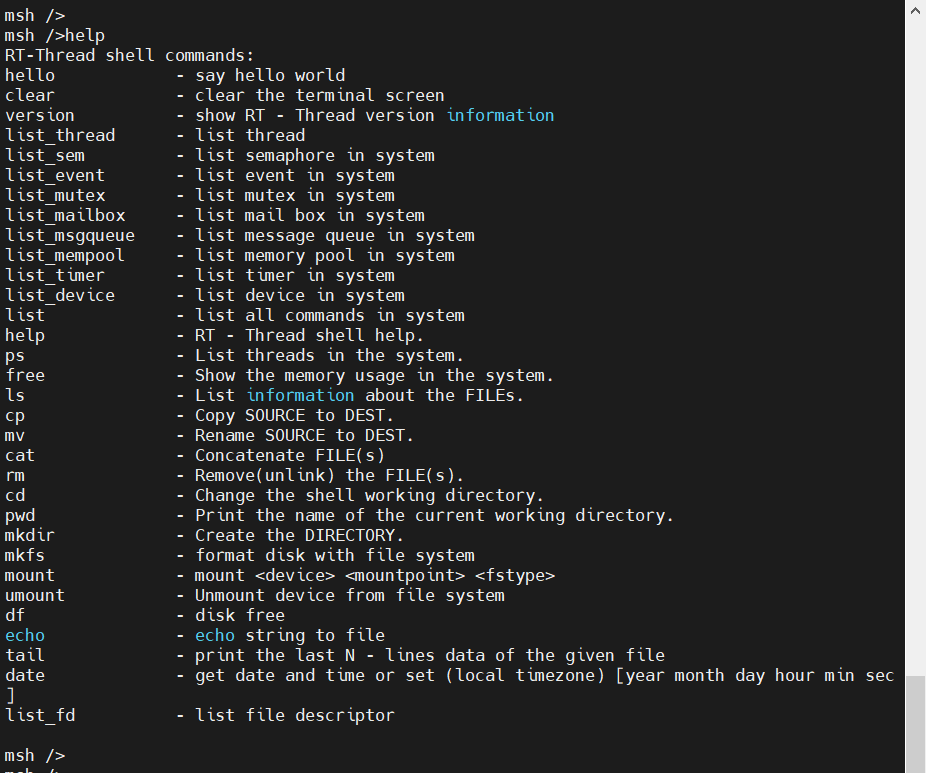
可以看到,這里有很多命令,我們接下將會使用到的有:
文件操作命令——ls/cp/mv/cat/rm
可以寫文件的命令——echo
目錄操作命令——cd/pwd/mkdir
文件系統操作命名——mkfs/mount/umount/df
使用過Linux的朋友應該會對上面這些命令感到熟悉。
接下來,我將會在msh中演示——如何通過這些命令對SD卡進行一些操作。
4.1 查看塊設備
我們可以在串口終端內使用list_device命令查看設備:

此時,我們可以看到已經有了一個名為“sd0”的塊設備。
4.2 格式化SD卡
初次使用的SD卡,可能沒有文件系統,或者文件系統不是FAT格式的,需要將SD卡格式化為FAT文件系統,RT-Thread后續才能掛載成功。
注意:格式化操作會導致SD卡上已有數據全部丟失;因此,在執行格式化操作前,請確認SD卡上沒有重要數據,或者你已對SD卡上的重要數據進行了備份。
接下來,我們可以通過mkfs命令對SD卡進行格式化:

mkfs執行會持續一段時間,請耐心等待(具體因不同SD卡容量和速度等級而異,我的32GB卡消耗了幾秒鐘)。
4.3 掛載文件系統
接下來,我們可以在串口終端內使用mount命令將SD卡掛載到根目錄:

這里,我先使用了mount -h查看了mount命令的用法。
另外需要注意的是,fstype參數使用的是elm(這里的elm實際就是FATFS)。
4.4 簡單的文件讀寫測試
前面提到echo命令比較特殊,可以寫文件,接下來使用echo寫文件,cat讀文件,ls查看文件:
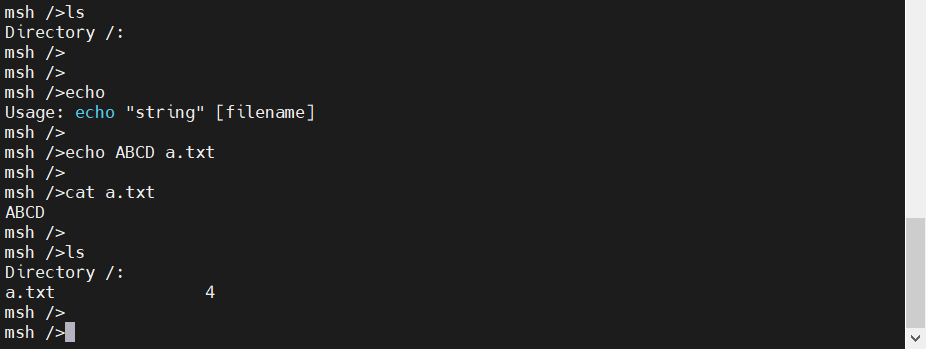
這里使用了ls、echo、cat命令,進行了文件讀寫操作。
4.5 簡單的目錄操作測試
接下來,進行簡單的目錄操作演示。
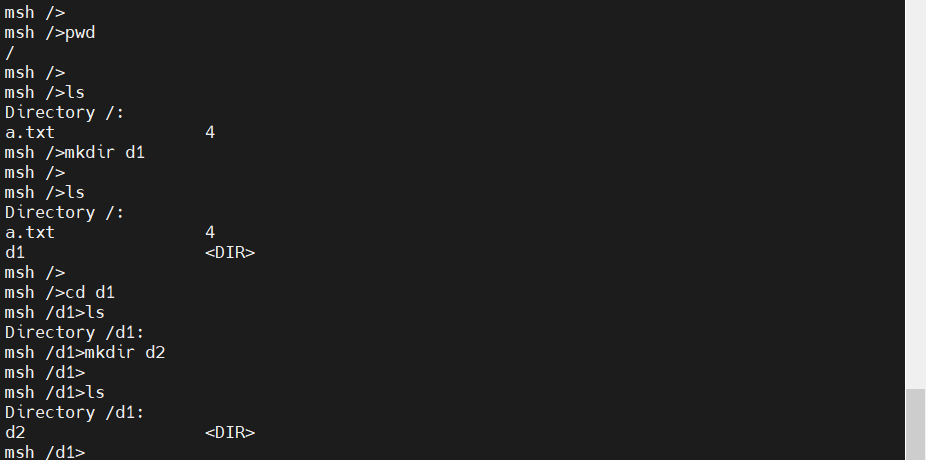
這里首先使用了pwd查看當前工作目錄,然后演示了ls、mkdir、cd命令;
如果你是對RT-Thread了解不多的朋友,看到這里可能會非常驚奇——在一個可以運行在單片機的RTOS上,居然可以這么方便的進行文件系統、目錄、文件操作。
五、業務代碼中使用SD卡
前面都是使用命令進行相關操作的,實際項目中往往需要在業務代碼中使用前面的那些功能,包括文件系統、目錄、文件操作。
5.1 使用代碼進行相關操作
所謂“授人以魚不如授人以漁”,這里不準備展開介紹前面所有命令行操作如何用代碼實現,只介紹如何找到前面那些操作的源碼實現。總體來說,主要有兩個方法:
grep大法
grep結合正則表達式進行搜索
使用其他你熟悉的工具也是可以的
RTFSC(read the f**king source code)
根據搜索到的位置打開文件并閱讀源碼
對,會這兩招就可以了。
下面以搜索mount命令的實現代碼為例進行演示。我們知道RT-Thread的msh命令是通過MSH_開頭的宏注冊到命令列表中的。因此可以搜索:

接下來,就可以打開./rt-thread/components/finsh/msh_file.c文件,跳轉到526進行查看了:
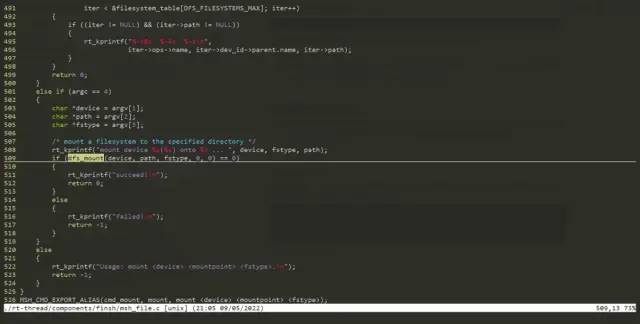
可以看到這里調用了dfs_munt實現了文件系統掛載功能。
六、完善細節
絕大部分文件系統都有文件的創建、修改時間信息,FATFS也不例外。因此,為了能夠讓SD卡上文件具有正確的創建、修改時間信息正常,建議使用SD卡的同時啟用RTC(Real Time Clock)以及NTP(Network Time Protocol)對時功能。本節主要介紹如何開啟RT-Thread的RTC和NTP對時功能。
6.1 使能RTC
在RT-Thread系統中,RTC的實現有兩種,一種是純軟件方式,另一種是硬件方式。
軟件方式的RTC,RT-Thread內核已經有了完整的實現,一般用于沒有硬件RTC的設備上(或者硬件RTC驅動還沒有支持的情況下)。RT-Thread的硬件RTC,和其他硬件功能類似,有RTC驅動框架和RTC硬件驅動兩部分。其中,RTC驅動框架已有RT-Thread內核實現,RTC硬件驅動由廠商實現(一般通過BSP或者CSP提供出來)。
軟件模擬RTC以及RTC驅動框架的配置項可以通過RT-Thread Settings進行設置:
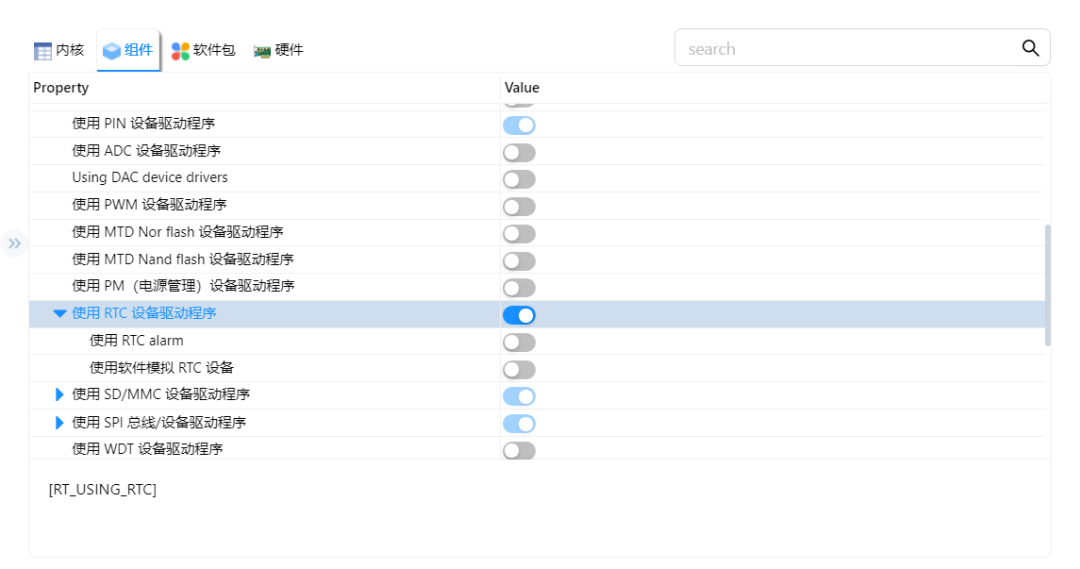
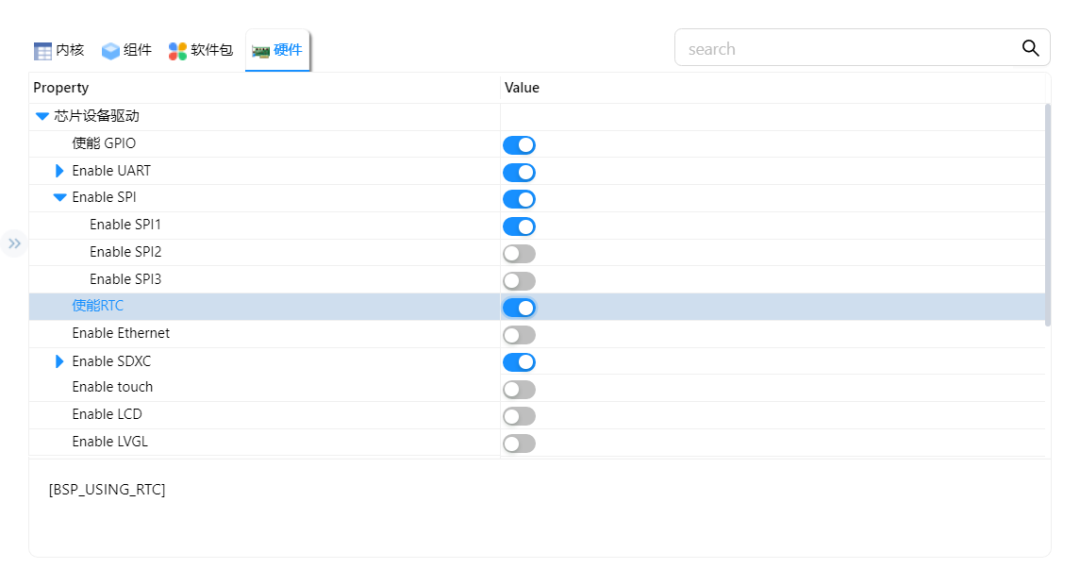
HPM6750的BSP中已經實現了RTC硬件驅動,我們可以在RT-Thread Settings中設置硬件RTC功能:
6.2 使能網絡和NTP——實現聯網自動對時
使能WiFi聯網,具體操作參考我此前的帖子:http://bbs.eeworld.com.cn/thread-1206656-1-1.html 或參考 (HPM6750 測評 | 不寫一行代碼,兩分鐘實現WiFi聯網)
RT-Thread的netutils軟件包中包含了NTP功能,使能NTP功能可以參考帖子中使能netutils軟件包中ifconfig相關的介紹。
七、本篇小結
可以看到,在基于RT-Thread系統的項目中,我們沒有添加任何代碼,就可以實現對HPM6750開發板上的SD卡進行文件系統、目錄、文件相關操作。這是因為RT-Thread系統本身已經積累了大量優秀開發者的工作成果,其中包括SDIO驅動框架、FATFS支持、芯片廠的SDXC驅動。所謂的“站在巨人的肩膀上”,大概就是這種體驗吧。
本篇就到這里了,感謝你的閱讀,下次再會。
(本文摘選自EEWORLD@xusiwei1236)
-
嵌入式
+關注
關注
5152文章
19676瀏覽量
317699
發布評論請先 登錄
如何使用CYW920829M2EVK-02 將 UART 速度設置為 8Mbps?
同一水平的 RISC-V 架構的 MCU,和 ARM 架構的 MCU 相比,運行速度如何?

RVCT編譯器是否比GNU的編譯器的代碼執行速度更快?
重磅更新 | 先楫半導體HPM_SDK v1.9.0 發布

HPM6E80 cherryusb_winusb10例程速度測試
高速鏈路設計難?利用HPM6750雙千兆以太網透傳實現LED大屏實時控制
開發者分享 | 適用于HPM的RustSBI實現
基于HPM_SDK_ENV開發應用程序的升級處理





 工商網監
工商網監
評論