") 基于毫米波雷達生命特征檢測原理及實現(xiàn)
基于毫米波雷達生命特征檢測原理及實現(xiàn)

背景
目前生命體征的測量主要分為接觸式和非接觸式兩種。接觸式的測量主要是通過傳感器或生物電極提取生理信息,然后通過轉(zhuǎn)化裝置就可以得到能表征人體生理活動的電信號或者機械信號。但是這種方法的缺點是必須直接接觸人體并且只適合短時間的連續(xù)監(jiān)測,并且在某些特殊的場合比如傳染病人、燒傷病人、新生兒等的生命體征監(jiān)測中較難實施。因此在實際臨床應(yīng)用上,找到一種非接觸式的生命體征監(jiān)測方法來獲取特殊場合的病人的生命體征信息是非常必要的。非接觸式監(jiān)測不需要任何傳感器接觸人體,這就使得連續(xù)測量病人的體征成為可能,也為分析機體的健康狀況以及做大數(shù)據(jù)分析、提前預(yù)知各種系統(tǒng)是否發(fā)生病變提供了幫助。
1.人體生命特征建模
心跳和呼吸頻率是人體心肺功能的重要指標(biāo),對于一般人體而言,心跳每分鐘大約 60 至100 次,而呼吸則是 15 至 30 次。如遇突發(fā)疾病或是人體劇烈運動之后,心跳次數(shù)可能達到120 次每分鐘,呼吸則會增至 60 次每分鐘。在很多的醫(yī)學(xué)影像中可以觀察到人體心臟的跳動過程,這種運動模式類似于振動的伸縮,其伸縮的幅度約為 0.01~0.2mm。并且人體心跳的速率在一個穩(wěn)定的范圍內(nèi)是周期變化的,所以,可以將心跳近似于正弦振動模型。呼吸是胸腔的擴張與收縮完成的,同樣類似于正弦振動,也可近似為正弦振動模型,其起伏的幅度約為 0.1~0.5mm。由于心跳呼吸頻率不一樣,可以視為兩者之間存在相位延遲,假設(shè)人體相對于雷達處于靜止?fàn)顟B(tài),根據(jù)以上分析可以建立如下模型。
 (1.1)
(1.1)其中,R0為雷達與人體之間的距離,第二項為呼吸部分,第三項為心跳,Ah和Ab分別為心跳和呼吸的振動幅度,fh和fb分別為心跳和呼吸的頻率值,θ是心跳的初始相位。
2.基于雷達的生命特征檢測原理
2.1 線性調(diào)頻連續(xù)波(LFMCW) 工作原理
線性調(diào)頻信號通過采用非線性相位調(diào)制技術(shù)獲得大時寬帶寬積,提高雷達系統(tǒng)的目標(biāo)探測能力、 測量精度和分辨能力,從而得到了廣泛的應(yīng)用。該體制雷達在發(fā)射周期內(nèi)發(fā)射頻率隨時間線性變化的信號,通過測量接收信號與發(fā)射信號的相對頻率關(guān)系來測量目標(biāo)信息。
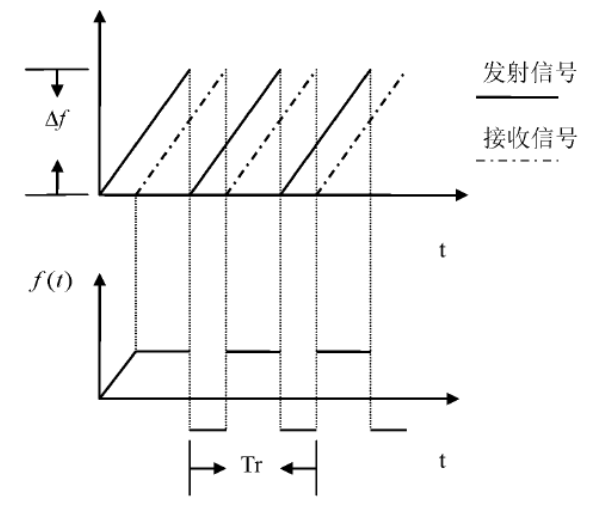 圖2-1 LFMCW回撥差怕信號時頻圖
圖2-1 LFMCW回撥差怕信號時頻圖雷達的發(fā)射信號、回波信號以及差拍信號的瞬時頻率如圖 2-1 所示。 則掃頻段在第 m 個信號重復(fù)周期內(nèi),發(fā)射信號可表示為:
 (2.1)
(2.1)其中T為發(fā)射調(diào)頻信號的時間間隔,f0是雷達載頻,φ0為發(fā)射信號初始相位。
μ=B/T(B為調(diào)頻帶寬)為調(diào)頻斜率。則距離為R(t)的點目標(biāo)產(chǎn)生的回波延時為τ(t),其回波信號可表示為:
 (2.2)
(2.2)Kr為目標(biāo)反射系數(shù)。
則回波信號經(jīng)過混頻(發(fā)射-接收)、相干解調(diào)后,回波差拍信號可以表示為:
 (2.3)
(2.3)2.2心跳和呼吸提取
將雷達正對人體,距離R0 放置,心臟和胸腔散射中心對雷達回波的調(diào)制都蘊含在雷達回波差拍信號中,只需分析差拍信息,就可提取出人體生命特征信號。 心臟和呼吸幅度均為毫米級別,而R0一般大于0.5m, 因此在慢時間維上近似認為R(t)為常數(shù) R(mT),對φb求關(guān)于慢時間t的導(dǎo)數(shù)可得其信號參數(shù)如下:
 中心頻率
中心頻率 初始相位
初始相位易知多個發(fā)射周期的初始相位信息表達式為:
 (2.4)
(2.4)其中,N為發(fā)射的線性調(diào)頻信號周期數(shù)。則提取快時間維的初始相位信息,即可獲得人體心肺信號。由于相位序列范圍限制為[-π,π],可知的φb(m)會因卷繞而出現(xiàn)相位突變,突變處的相位會比未卷繞序列的相應(yīng)相位增加±2π,造成相位方差的增加,從而導(dǎo)致信號解算結(jié)果有誤。 因此,需要對φb(m) 進行適當(dāng)?shù)南嘁疲M行解卷繞操作。由公式2.4可知,兩個快時間維的相位變化為:Δφ=4π/λ(ΔR),本方案中λ=8.6mm,-1mm<ΔR<1mm,則-π/2<Δφ<π/2。因此需要對相位變化不滿足Δφ的相位點進行解卷繞操作。
2.4實時生命體征信息檢測
心肺信號需要進行分離。生物雷達信號處理方法不同于常用的心電和脈搏波信號檢測方法,它檢測的是心跳和呼吸復(fù)合的信號。呼吸運動在幅度上比心跳強得多,使得心跳運動不易分離提取。而且呼吸與心跳引起的微動在體表空間上重疊,由于雷達系統(tǒng)函數(shù)的非線性,易產(chǎn)生頻域交調(diào)。另外, 雷達信號的波形表現(xiàn)為微弱的心跳信號疊加在幅度較大的呼吸信號之上。對于心跳信號,呼吸信號是一個強的基線漂移干擾,這使得時域上的尋峰或過零檢測等常規(guī)心率測量方法難以應(yīng)用到雷達解調(diào)信號的處理上來。
在分離了呼吸和心跳信號之后,分別進行頻率計算。對于心跳數(shù)據(jù),先進行移動損毀判斷,如果波的能量超過了設(shè)定的閾值則丟棄該段數(shù)據(jù),避免過大的運動所帶的能量影響最終計算的準確性。然后對該數(shù)據(jù)分別進行基于 FFT、自相關(guān)、峰值間隔的譜估計,并分別計算出其置信參數(shù),然后根據(jù)置信參數(shù)進行判斷最終取值。
在基于 FFT 計算心率的過程中,需要檢測并濾除呼吸產(chǎn)生的一次諧波,并對結(jié)果進行中值濾波。對于呼吸數(shù)據(jù)只進行基于 FFT 和峰值間隔的譜估計,然后同樣根據(jù)計算出的置信參數(shù)判斷最終取值。
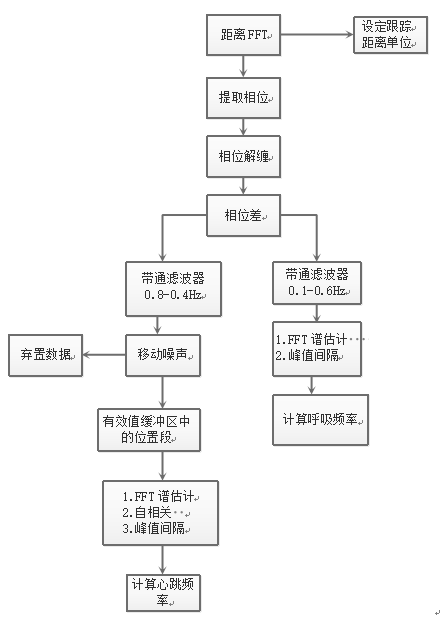 圖2-2心跳呼吸信號提取流程圖
圖2-2心跳呼吸信號提取流程圖 -
毫米波雷達
+關(guān)注
關(guān)注
107文章
1103瀏覽量
65379
發(fā)布評論請先 登錄
ADAS和防撞系統(tǒng)中的毫米波雷達方案

激光雷達VS毫米波雷達,優(yōu)缺點全知道!
毫米波雷達信號的傳輸特性
毫米波雷達的基頻和調(diào)制技術(shù) 毫米波雷達在機器人導(dǎo)航中的應(yīng)用
毫米波雷達與超聲波雷達的區(qū)別
毫米波雷達如何提高測距精度
毫米波雷達與激光雷達比較 毫米波雷達在自動駕駛中的作用
毫米波雷達工作原理 毫米波雷達應(yīng)用領(lǐng)域
物聯(lián)網(wǎng)中的高分辨率精確距離測量方案_毫米波雷達






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論