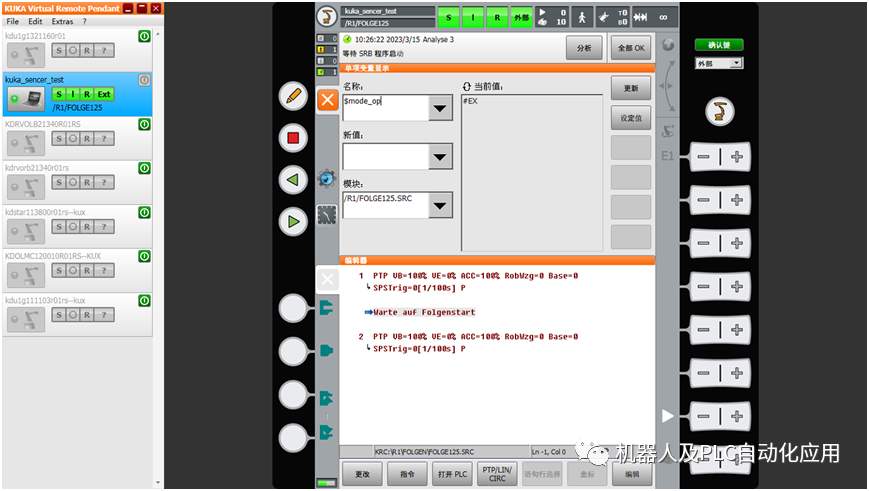
 KUKA運用系統變量$MODE_OP編程
KUKA運用系統變量$MODE_OP編程

WARTE BIS E2200
$LOOP_MSG[]="E2200"
$LOOP_CONT=TRUE
WAIT FOR ($IN[2200]) OR (NOT $LOOP_CONT AND ($MODE_OP<>#EX))
$LOOP_MSG[]=" "
$MODE_OP
當前運行模式
$MODE_OP=Operating mode
| Operating mode |
Type: ENUM ? #AUT: 自動 ? #EX: 外部自動 ? #T1 ? #T2 |
1例:
WAIT FOR $CYCFLAG[254] OR ( NOT ($LOOP_CONT) AND ($MODE_OP<>#EX))
$LOOP_CONT=TRUE
END
$LOOP_CONT模擬終止等待語句的條件激活
2例:
如果沒有達到編程設定的速度,則將輸出端 2 設定為 FALSE。
IF (($MODE_OP == #T1) OR ($OV_PRO < 100)) THEN
$OUT[2] = FALSE
ENDIF
…
審核編輯:彭靜
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
編程
+關注
關注
88文章
3689瀏覽量
95261 -
KUKA
+關注
關注
3文章
218瀏覽量
16989
原文標題:KUKA運用系統變量$MODE_OP編程
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
KUKA庫卡機器人伺服驅動器相關型號舉例
普通交流馬達,屬于伺服系統的一部分,主要應用于高精度的定位系統。型號舉例:KUKA庫卡 00-103-117 Lenze伺服驅動器 (EVS9326-KHV531)KUKA庫卡 00-
發表于 09-08 16:30
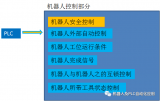
機器人PLC控制要點
$OUT[PF0]=(P0_MERKER OR (DownLoadActive AND ($Mode_OP==#EX))) AND$IN_HOME -$IN_HOME :$OUT[4036]–在FOLGE程序的首部存儲當前的軸坐標為初始點VW(#VW_AUE_WAIT,TRUE )
KUKA系統變量:$ERR
ON_ERROR_PROCEED 可用于抑制由以下程序行觸發的運行時錯誤消息。機器人控制器跳過觸發錯誤的語句,并用有關錯誤的信息填充系統變量 $ERR。
KUKA系統變量$err注意事項說明
該變量可用于評估相對于提前運行的當前執行程序。例如,該變量可用于評估程序中的錯誤,以便能夠使用適當的故障服務功能對其進行響應。
KUKA系統變量$INTERPRETER解釋器
通過變量可以讀取許多系統狀態,并且在許多情況下也可以進行設置。嚴格來說,這些變量存在多次-每個解釋器一次。對于所有解釋器,它們的名稱相同。
KUKA系統變量:$ERR 程序信息的結構
該變量可用于評估當前執行的程序相對于提前運行。例如,該變量可用于評估程序中的錯誤,以便能夠使用合適的故障服務功能對其進行響應。
從FOLGEN程序中如何實現自動回到CELL程序/開始執行FOLGEN程序
IF($OUT[PF0]AND VW_CALL_CELL AND ( NOT $PRO_MOVE) AND ($MODE_OP==#EX))THEN機器人在原位(A15),執行了CALL程序,機器人沒有程序執行,處在外部自動狀態

KUKA機器人系統變量$PRO_NAME所選程序的名稱(參考解釋器)
如果機器人控制器在Multi-Submit模式下操作(僅適用于KUKA系統軟件8.3及更高版本),則變量無效。多提交模式下機器人控制器的系統狀態分組在
KUKA系統變量:$PROG_INFO
$PROG_INFO[]將某些系統狀態組合在一個結構中。 $PROG_INFO[ Interpreter ] = Information Interpreter 類型:INT ? 1:機器人翻譯
KUKA系統變量$err說明
該變量可用于評估相對于提前運行的當前執行程序。例如,該變量可用于評估程序中的錯誤,以便能夠使用適當的故障服務功能對其進行響應。





 工商網監
工商網監
評論