") 基于相位式測距技術(shù)實現(xiàn)目標標簽定位的應(yīng)用設(shè)計
基于相位式測距技術(shù)實現(xiàn)目標標簽定位的應(yīng)用設(shè)計

射頻識別(Radio Frequcncy Identification,RFID)是一項非接觸式自動識別技術(shù),具有能耗低、適應(yīng)性強、操作快捷等許多優(yōu)點。近年來,研究的重點轉(zhuǎn)向了超高頻段(UHF,860~960 MHz),已經(jīng)有科研人員將提取射頻信號到達入射角或相位差作為RFID定位研究的新方向。
參考文獻證實了在低信噪比實測環(huán)境中提取相位差信息的可行性,但是沒有提取出位置信息;參考文獻中采取機器學習訓練機制對多天線相位差信息進行參數(shù)提取,但是僅限用于活動范圍較小的醫(yī)療跟蹤。
本文研究的基于相位式測距的UHF RFID定位方法,與基于信號的傳播時延和強度衰減作為定位依據(jù)的方法有所不同。結(jié)合離散頻譜校正技術(shù)提取發(fā)射信號與接收信號之間的相位,得到信號相位差,進而得到閱讀器與標簽之間的距離,利用多個閱讀器所測得的距離,實現(xiàn)對目的標簽的定位。
1 基于相位式測距的UHF RFID定位方案
1.1 閱讀器和標簽的通信機制分析
閱讀器和標簽的通信是基于ITF(Interrogator TalkFirst)機制的,即基于閱讀器的命令與閱讀器的回答之間交替發(fā)送的半雙工機制。
對于基于相位法的超高頻RFID定位系統(tǒng),選擇標簽返回PC+EPC+CRC16信息這一過程為基準進行信號相位的提取并用于標簽的定位中。標簽返回這些信息的過程為反向散射過程,需要閱讀器發(fā)送一個單頻的CW信號為標簽提供能量并作為標簽反向散射信息的載波。對于標簽信息的調(diào)制過程,則是通過標簽的基帶數(shù)字信號控制標簽芯片阻抗在兩種狀態(tài)之間切換,使得天線與標簽芯片阻抗在匹配與失配之間轉(zhuǎn)換來改變天線的反射系數(shù),完成整個調(diào)制過程。若改變標簽芯片和天線實部阻抗的匹配與失配,為ASK調(diào)制;改變阻抗虛部的匹配與失配,則為PSK調(diào)制。
由于ASK調(diào)制較為容易實現(xiàn),目前市面上絕大多數(shù)標簽采用ASK調(diào)制。標簽芯片和天線的等效電路如圖1所示。
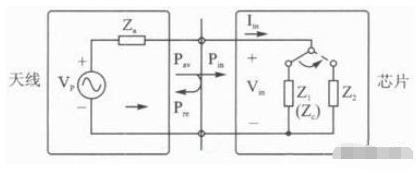
圖1 標簽芯片和天線的等效電路
其中,Za為天線阻抗,Z1為數(shù)字信號為高電平時的阻抗,與Za失配;Z2為數(shù)字信號為低電平時的阻抗,與Za相匹配。當信號為高電平時,天線阻抗與芯片阻抗失配,閱讀器發(fā)送的CW信號無法進入芯片,被天線反射到空間中;當信號為低電平時,天線阻抗與芯片阻抗匹配,閱讀器發(fā)送的CW信號將進入芯片,不會反射回空間中,由此便完成了信號的調(diào)制過程。
1.2 系統(tǒng)設(shè)計
對于整個定位系統(tǒng),需采用多個閱讀器分別計算與同一標簽的距離信息,并根據(jù)幾何定位獲取標簽的位置信息。對于單個的閱讀器及相關(guān)算法模塊,系統(tǒng)硬件設(shè)計框圖如圖2所示。
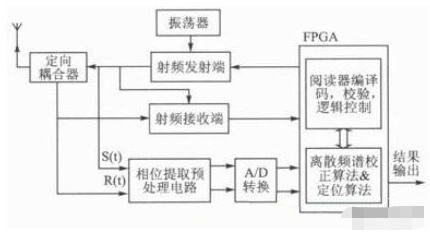
圖2 定位系統(tǒng)硬件設(shè)計框圖
①閱讀器的設(shè)計,主要進行閱讀器與標簽之間的通信,并提取標簽的EPC信息;
②相位提取預(yù)處理電路與相位提取算法模塊設(shè)計,主要用于處理收發(fā)副載波信號,并提取這兩個信號的相位用于測距和定位。
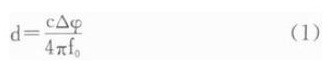
通過修改標簽反向散射信息過程中閱讀器發(fā)送的單頻CW信號的形式,即將一個低頻的副載波信號以AM調(diào)制的方式調(diào)制到CW信號上。對于修改后的CW信號,將發(fā)送信號s(t)和接收信號r(t)分別進行帶通采樣和A/D轉(zhuǎn)換后送入數(shù)字域,并采用離散頻譜校正方法估計收發(fā)信號中副載波分量的相位φs和φr,計算得到收發(fā)副載波信號的相位差△φ,設(shè)副載波頻率為f0,則閱讀器與標簽之間的距離可表示為
在整個定位系統(tǒng)中,我們采用多個閱讀器分別對同一標簽進行測距,結(jié)合PDoA(Phase Difference of Arrival)的最小二乘法獲取標簽的位置信息。系統(tǒng)信號處理框圖如圖3所示,可見△φ的精度直接影響后續(xù)的定位精度。
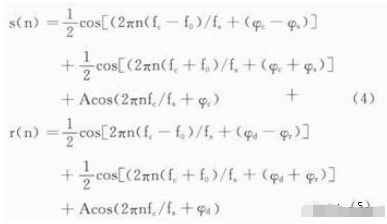
圖3 系統(tǒng)信號處理框圖
1.3 單頻副載波調(diào)幅
本文選擇閱讀器發(fā)射信號載波頻率fc=915 MHz,則λc=c/fc=0.327 9 m。設(shè)定測距范圍為0.3~20 m,在此測程內(nèi)包含了2×20/0.3 27 9=121.988 4個載波周期,即存在相位模糊,所以不能直接用載波信號提取相位。針對這一問題,采用單頻副載波調(diào)幅的方式,即將一較低頻率的副載波與載波調(diào)制,將副載波作為獲取相位信息的信號。
根據(jù)測距范圍,需要副載波波長λ0/2≥20 m,則副載波頻率f0=c/λ0≤7.5 MHz。考慮到ISO/IEC 18000—6C協(xié)議標準對預(yù)留頻率資源的限制,若副載波頻率選得過大,則會超出協(xié)議或者地方規(guī)定的UHF RFID使用頻段;如果副載波頻率選得過低,導致波長過長,會使得副載波的相位變化微小,難以保證測量精度。綜上考慮,本文選擇副載波頻率為2 MHz,對于0.3~20 m的測量距離,副載波的相位變化范圍為1.44°~96°,在一個合適的區(qū)間內(nèi)。
2 基于帶通采樣的相位提取與測距
設(shè)采樣頻率為fs,則經(jīng)帶通采樣后發(fā)射與接收信號分別為
s(n)=[cos(2πnf0/fs+φs)+A]·cos(2πnfc/fs+φc) (2)
r(n)=[cos(2πnf0/fs+φr)+A]·cos(2πnfc/fs+φd) (3)
φc、φs分別為發(fā)送端載波、副載波相位,φd、φr,分別為接收端載波、副載波相位,A為調(diào)制電平。
對式(2)、式(3)積化和差,進一步表示為
式(4)、式(5)所示的離散信號經(jīng)FFT后自身帶有相位信息,但是,在相位提取時,由非整周期的時域截斷導致的頻譜泄漏和多頻率諧波信號各頻率成分相互的干涉現(xiàn)象都會使相位偏離真實值,這就需要借助離散頻譜校正技術(shù)。這里,綜合考慮對主辦的能量集中性和窗函數(shù)表達式的復雜性,選用加hanning窗的比值法、能量重心法對相位進行提取與校正。
由式(4)、式(5)可知,射頻載波信號經(jīng)副載波調(diào)制后會產(chǎn)生一個差頻項和一個和頻項,它們的相位值分別對應(yīng)載波相位與副載波相位的差與和,則副載波信號經(jīng)標簽反向散射返回后的相位差為

將式(6)帶入式(1),即可得到閱讀器與標簽之間的距離信息。
3 定位仿真分析
使用Matlab軟件進行仿真,參數(shù)設(shè)置如下:
①信號參數(shù),采樣頻率fs=9.128 MHz,副載波頻率f0=2 MHz,載波頻率fc=915 MHz,調(diào)制電平A=1。
②環(huán)境參數(shù),在20 m×20 m二維空間的四個角上布置4個閱讀器,標簽位置隨機投放。
③噪聲,實際定位中噪聲不可忽略,定義疊加噪聲幅度,分別在SNR=5 dB、8 dB、11dB、14 dB、17 dB下仿真。
進行1000次蒙特卡洛仿真實驗,定義均方根誤差(RMSE),式中n為測量次數(shù),di為測量值與真實值的偏差。
把用比值法、能量重心法得到的測量值進行比較,如圖4所示,在小信噪比環(huán)境下,比值法稍優(yōu)于能量重心法,隨著信噪比的增大,兩種方法的測相誤差和測距誤差都隨之減小,在SNR》11 dB后,兩種算法的誤差基本相同。在各信噪比下,測相誤差最大達到6.27°,最小僅為1.43°,測距誤差的范圍為0.30~1.31 m。
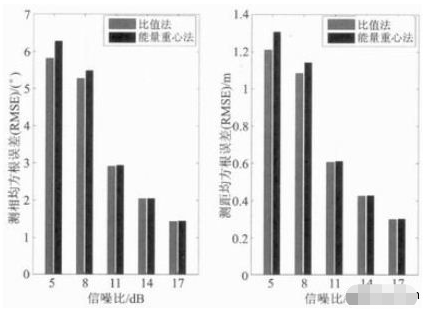
圖4 測相,測距誤差對比
圖5為采用最小二乘法進行定位后兩種算法的RMSE對比圖。從整體趨勢上來看,隨著信噪比的增大,定位誤差不斷減小。在噪聲較小SNR =17 dB時,兩種方法RMSE均在0.35 m左右;在噪聲增大到SNR=5 dB時,比值法RMSE為1.47 m,能量重心法RMSE為1.57 m。在SNR由5 dB增大到8 dB的過程中,兩種方法的RMSE都有明顯的降低,分別降低了0.43 m和0.51 m。
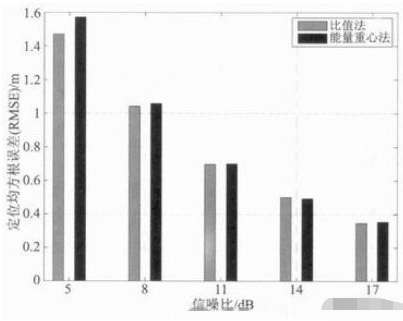
圖5 定位誤差對比
圖6為在不同信噪比下,比值法的累計定位誤差曲線圖。在SNR≥14 dB時,定位較為準確,曲線收斂速度很快;在SNR=11 dB時,定位誤差在0.94 m以下的概率為80%,定位準確度也很高;當信噪比減小到SNR=8 dB時,定位誤差有86.8%的概率小于1.5 m;在SNR=5 dB時,定位誤差小于1.5 m的概率為68%,但是可以看出曲線的收斂速度較慢。
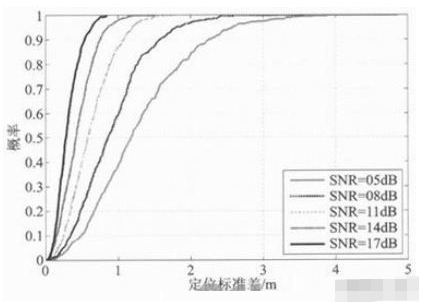
圖6 信噪比定位誤差的影響
結(jié)語
本文研究了一種用于超高頻RFID定位的相位式測距方法,在帶通采樣方式下,結(jié)合離散頻譜校正相位估計,進行了定位仿真。仿真實驗中,測試了不同環(huán)境噪聲對定位精度的影響。在噪聲較大時,比值法的定位精度稍優(yōu)于能量重心法;在小噪聲環(huán)境下,兩種方法定位精度差別不大,而能量重心法與比值法相比更為簡單,較為適用。綜上所述,基于相位法的定位有較好的有效性和穩(wěn)定性,具有良好的應(yīng)用前景。
責任編輯:gt
-
RFID
+關(guān)注
關(guān)注
392文章
6448瀏覽量
242650 -
閱讀器
+關(guān)注
關(guān)注
0文章
303瀏覽量
28420 -
自動識別
+關(guān)注
關(guān)注
3文章
227瀏覽量
23386
發(fā)布評論請先 登錄
UWB - TDOA方案定位技術(shù)
智慧工地精準人員定位標簽挑選指南

Nordic測距介紹
AOA 和 channel Sounding 和 rssi 定位技術(shù)對比
UWB 定位測距
藍牙AOA高精度定位技術(shù):原理、應(yīng)用與未來展望
征求 NFER 近場電磁測距 人員定位
毫米波雷達如何提高測距精度
工業(yè)環(huán)境中的測距與定位應(yīng)用解決方案
UWB標簽與其他定位技術(shù)的比較
UWB技術(shù)如何實現(xiàn)不同維度的定位需求
探索UWB技術(shù)的獨特優(yōu)勢:實現(xiàn)高精度定位
主動式藍牙RSSI定位系統(tǒng)和被動式藍牙RSSI定位系統(tǒng)的原理
藍牙AOA是如何實現(xiàn)人員定位的呢
怎么選人員定位技術(shù)?藍牙人員定位技術(shù)的優(yōu)勢






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論