") 探討物理陀螺儀的等效9軸解決方案
探討物理陀螺儀的等效9軸解決方案

能夠確定設(shè)備的位置和移動(dòng)正在成為許多便攜式系統(tǒng)中的標(biāo)準(zhǔn)功能。諸如手機(jī)和平板電腦之類(lèi)的系統(tǒng)使用來(lái)自加速度計(jì)和磁力計(jì)的6軸數(shù)據(jù)來(lái)啟用關(guān)鍵功能,這些功能使消費(fèi)類(lèi)電子設(shè)備的界面更容易使用。
下一代設(shè)備正朝著采用陀螺儀功能的9軸傳感器融合發(fā)展,以進(jìn)一步改善用戶體驗(yàn)。例如,當(dāng)健康監(jiān)視器可以區(qū)分步行,游泳和跑步等活動(dòng)時(shí),它可以更準(zhǔn)確地跟蹤用戶。陀螺儀數(shù)據(jù)還啟用了新的界面功能,例如手勢(shì)識(shí)別,用戶可以在其中揮動(dòng)手腕來(lái)顯示。
許多消費(fèi)類(lèi)電子設(shè)備都可以從9軸傳感器融合中受益(見(jiàn)圖1)。例如,手機(jī),游戲系統(tǒng),健康監(jiān)視器和可穿戴電子設(shè)備可以實(shí)現(xiàn)高附加值功能,例如三維手勢(shì)識(shí)別,相對(duì)于其他用戶的相對(duì)定位以及運(yùn)動(dòng)跟蹤。為此,設(shè)備需要9軸傳感器數(shù)據(jù)以及有效處理數(shù)據(jù)的能力。
請(qǐng)注意,這些系統(tǒng)中的許多系統(tǒng)并不需要戰(zhàn)斗機(jī)保持飛行所需的精確度。相反,他們需要一種符合成本效益的9軸傳感器融合實(shí)施方案,以滿足消費(fèi)者應(yīng)用程序的需求,以改善用戶體驗(yàn)。有了新的MagGyros,例如Kionix的KMX62G,開(kāi)發(fā)人員可以使用6軸傳感器(加速度計(jì)+磁力計(jì))提供9軸輸出的等效值(加速度計(jì)+磁力計(jì)+陀螺儀),同時(shí)最大程度地降低能耗90%。實(shí)際上,Sensor Fusion使用多個(gè)傳感器來(lái)填充各個(gè)傳感器的盲點(diǎn)。
9軸傳感器融合
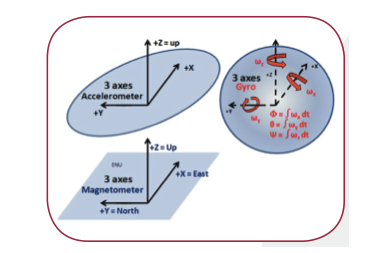
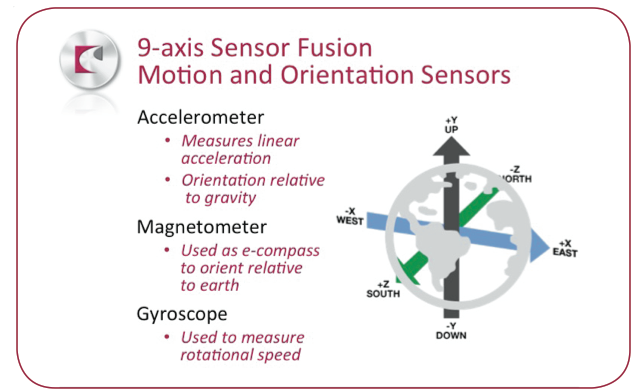
使用9軸傳感器融合(來(lái)自加速度計(jì),磁力計(jì)和陀螺儀的數(shù)據(jù)),系統(tǒng)可以準(zhǔn)確地將自己定位在世界上,包括傾斜和方向以及位置和旋轉(zhuǎn)的變化(請(qǐng)參見(jiàn)圖2)。有效地,傳感器融合使用多個(gè)傳感器來(lái)填充單個(gè)傳感器的盲點(diǎn)。
加速度計(jì)
加速度計(jì)可測(cè)量3個(gè)軸上的加速度。重要的是要注意,重力是加速度的一種形式,因此靜止的物體仍然具有向下的加速度。這一事實(shí)使加速度計(jì)能夠確定系統(tǒng)相對(duì)于“向下”的方向。
此信息還可用于確定系統(tǒng)的級(jí)別。許多手持式和便攜式設(shè)備都使用方向來(lái)調(diào)整顯示,以匹配用戶如何握住設(shè)備。通常使用此功能的設(shè)備包括手機(jī),平板電腦和筆記本電腦。
加速度計(jì)的另一個(gè)獨(dú)特功能是能夠判斷設(shè)備是否掉落。例如,當(dāng)一臺(tái)筆記本電腦放在桌子上時(shí),它檢測(cè)到1G。但是,如果將筆記本電腦從桌子上敲下來(lái),當(dāng)它掉落到地板上時(shí)它將檢測(cè)到0G(類(lèi)似于零重力或失重模擬使飛機(jī)自由落體)。這使系統(tǒng)能夠檢測(cè)其是否掉落并且有發(fā)生碰撞的迫在眉睫的危險(xiǎn)。對(duì)于筆記本電腦,系統(tǒng)可以主動(dòng)將硬盤(pán)驅(qū)動(dòng)器頭停放在安全的位置,以防止損壞驅(qū)動(dòng)器或數(shù)據(jù)。
加速度計(jì)已開(kāi)發(fā)出許多其他用途,包括提高功率效率。考慮一下,幾分鐘內(nèi)沒(méi)有移動(dòng)的健身追蹤器可能不會(huì)被使用。然后,設(shè)備可以自行關(guān)閉電源。這個(gè)簡(jiǎn)單的用例可以在很多應(yīng)用中顯著提高電池壽命。
磁力計(jì)
磁力計(jì)測(cè)量磁場(chǎng)。它可以用在指南針中以識(shí)別地球的磁場(chǎng)。通過(guò)分析檢測(cè)到的磁場(chǎng)的大小,方向和變化率,磁力計(jì)可以用來(lái)確定磁北的方向。
但是,作為獨(dú)立傳感器,磁力計(jì)通常無(wú)法識(shí)別磁北的方向。傳統(tǒng)的羅盤(pán)使用帶有軸承的磁棒,該軸承會(huì)限制磁棒在一個(gè)方向上對(duì)齊。適當(dāng)調(diào)平外殼,使用戶可以最佳地將桿與磁北對(duì)齊。在電子磁力計(jì)中,使用3軸感測(cè)來(lái)計(jì)算磁場(chǎng)的方向和大小。磁力計(jì)軸與被測(cè)信號(hào)之間的任何傾斜都會(huì)在報(bào)告的磁場(chǎng)方向上引起誤差。
手持設(shè)備可以同時(shí)使用加速度計(jì)和磁力計(jì)來(lái)確定磁北。這可以通過(guò)使用加速度計(jì)識(shí)別設(shè)備的傾斜度并使用此信息來(lái)補(bǔ)充磁力計(jì)的讀數(shù)來(lái)實(shí)現(xiàn)。
陀螺儀
桌上靜止的加速度計(jì)可以感應(yīng)到設(shè)備處于靜止?fàn)顟B(tài)。但是,如果以加速度計(jì)為旋轉(zhuǎn)中心旋轉(zhuǎn)系統(tǒng),則加速度計(jì)將無(wú)法檢測(cè)到運(yùn)動(dòng)。這實(shí)際上是加速度計(jì)的一個(gè)盲點(diǎn)。如果系統(tǒng)可以訪問(wèn)陀螺儀,則陀螺儀可以檢測(cè)到旋轉(zhuǎn)。
不幸的是,對(duì)于許多應(yīng)用來(lái)說(shuō),采用陀螺儀技術(shù)很難證明其合理性。在這三種類(lèi)型的傳感器中,陀螺儀是最大和最昂貴的。盡管傳感器提供了有用的信息,但物理陀螺儀的成本,尺寸和/或功耗往往超過(guò)其所代表的值。由于這些原因,開(kāi)發(fā)人員經(jīng)常不得不將位置和方向功能限制為由加速度計(jì)和磁力計(jì)提供的6軸數(shù)據(jù)。
KMX62G瑪格羅
如今,軟件算法和低噪聲,低延遲傳感器的進(jìn)步使得僅使用加速度計(jì)和磁力計(jì)的數(shù)據(jù)來(lái)模擬陀螺儀輸出成為可能。這是MagGyros中使用的方法,其中系統(tǒng)根據(jù)對(duì)設(shè)備先前位置的了解來(lái)計(jì)算設(shè)備的旋轉(zhuǎn)方向和速度。換句話說(shuō),當(dāng)系統(tǒng)可以隨時(shí)間跟蹤方向時(shí),它可以推斷旋轉(zhuǎn)數(shù)據(jù)。
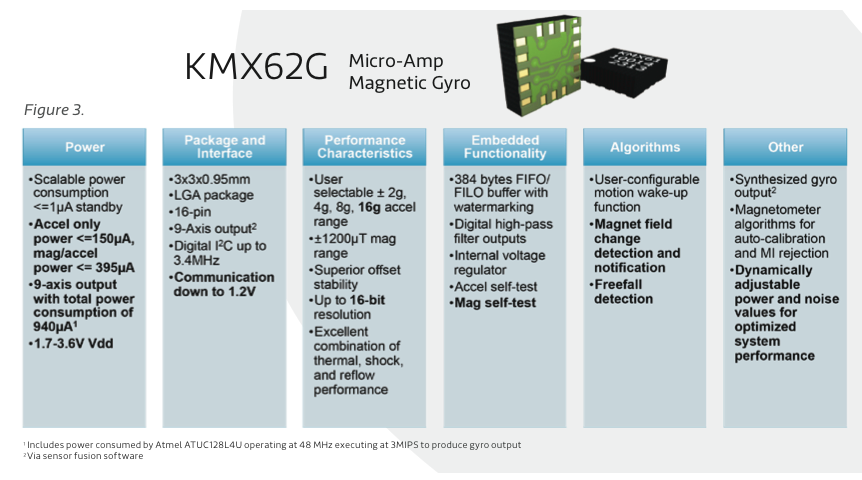
為了使開(kāi)發(fā)人員能夠?qū)⑼勇輧x功能引入各種新應(yīng)用,Kionix提供了KMX62G MagGyro。KMX62G采用了Kionix的KMX62加速器/磁力計(jì),并通過(guò)行業(yè)領(lǐng)先的傳感器融合軟件和自動(dòng)校準(zhǔn)算法對(duì)其進(jìn)行了增強(qiáng)(參見(jiàn)圖3)。這使得KMX62G不僅僅是一個(gè)加速器/磁力計(jì)。它是業(yè)界首款高精度陀螺儀仿真器,提供9軸定位功能。
正確的精度水平
由于MagGyro可以估算而不是直接測(cè)量轉(zhuǎn)速,因此其精度不如物理陀螺儀高。但是,陀螺儀精度最常在涉及距離的情況下發(fā)揮作用,例如在駕駛飛機(jī)時(shí):偏離100英里一度會(huì)使您偏離航向。另一方面,諸如手勢(shì)識(shí)別之類(lèi)的近距離活動(dòng)可以容忍相對(duì)較大的錯(cuò)誤。因此,專(zhuān)注于用戶體驗(yàn)的消費(fèi)電子應(yīng)用不需要物理陀螺儀的科學(xué)精度。
力量
物理陀螺儀總是在諧振,這意味著它會(huì)不斷消耗功率。通常,物理陀螺儀在2.5 V或更高電壓下工作,消耗4000至7000μA(見(jiàn)圖4)。請(qǐng)注意,這僅適用于陀螺儀。
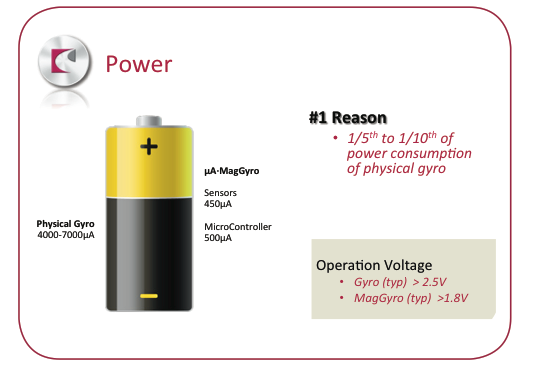
使用KMX62G MagGyro,加速度計(jì)+磁力計(jì)傳感器消耗450μA。即使考慮到執(zhí)行軟件算法的微控制器所需的功率(?500μA),整個(gè)MagGyro操作也小于1000μA。因此,與物理陀螺儀相比,KMX62G的能效提高了5到10倍。
啟動(dòng)時(shí)間
由于它們消耗大量電能,因此系統(tǒng)通常會(huì)盡可能頻繁地關(guān)閉陀螺儀。但是,物理陀螺儀可能需要50到100ms的時(shí)間才能穩(wěn)定輸出。因此,使用物理陀螺儀的高能效實(shí)現(xiàn)會(huì)導(dǎo)致響應(yīng)速度慢,這可能會(huì)對(duì)用戶體驗(yàn)產(chǎn)生負(fù)面影響。從啟動(dòng)開(kāi)始,KMX62G大約需要15-20ms才能開(kāi)始輸出9軸數(shù)據(jù)。這是由于需要收集第一批樣品并進(jìn)行處理。一旦建立了數(shù)據(jù)管道,此延遲將有效消除。但是,對(duì)于許多應(yīng)用程序而言,KMX62G的低能耗使該設(shè)備可以在大多數(shù)時(shí)間運(yùn)行,從而消除了那些重要的應(yīng)用程序或用例的啟動(dòng)延遲。
成本
與具有物理陀螺儀的等效9軸解決方案相比,KMX62G的實(shí)現(xiàn)成本大大降低。它在沒(méi)有物理陀螺儀和提供基于9軸定位的功能之間提供了極好的中間解決方案。
性能與品質(zhì)
MagGyro的性能高度依賴于其組件的質(zhì)量。考慮到為了模擬陀螺儀,MagGyro算法使用了來(lái)自加速度計(jì)和磁力計(jì)的傳感器數(shù)據(jù)。任何一個(gè)傳感器中的噪聲都會(huì)迅速削弱陀螺儀計(jì)算的準(zhǔn)確性。此外,相同的傳感器數(shù)據(jù)隨后用于傳感器融合算法中以計(jì)算9軸定位。這意味著來(lái)自這些傳感器的錯(cuò)誤可能會(huì)更加復(fù)雜。因此,加速度計(jì)和磁力計(jì)的低噪聲性能對(duì)于實(shí)現(xiàn)9軸系統(tǒng)的精度至關(guān)重要。
傳感器之間的同步也很關(guān)鍵。如果加速度計(jì)的讀數(shù)與在不同時(shí)間捕獲的磁力計(jì)的讀數(shù)相關(guān)聯(lián),則可能會(huì)導(dǎo)致MagGyro輸出出現(xiàn)錯(cuò)誤。使用外部組件時(shí),設(shè)計(jì)緊湊的電路以確保這些傳感器的精確同步可能很困難。為了簡(jiǎn)化設(shè)計(jì),許多設(shè)計(jì)人員更喜歡通過(guò)使用將加速度計(jì)和磁力計(jì)結(jié)合在一起的單個(gè)組件(例如KMX62G)來(lái)消除同步問(wèn)題。此外,磁力計(jì)的等待時(shí)間可能會(huì)因其基礎(chǔ)技術(shù)而異。KMX62中的磁力計(jì)是市場(chǎng)上最低的延遲之一。這樣可以實(shí)現(xiàn)加速度計(jì)和磁力計(jì)之間數(shù)據(jù)的精確同步,并實(shí)現(xiàn)了Kionix的MagGyro解決方案的高性能。
KMX62G MagGyro的最后一部分是模擬陀螺算法的軟件實(shí)現(xiàn)。這些算法由許多功能組成,實(shí)現(xiàn)的質(zhì)量決定了系統(tǒng)的整體性能,進(jìn)而決定了用戶體驗(yàn)。這些算法在主機(jī)處理器或傳感器集線器上實(shí)現(xiàn)。提供了應(yīng)用程序編程接口(API)來(lái)簡(jiǎn)化產(chǎn)品設(shè)計(jì)。受支持的平臺(tái)包括高通的Snapdragon和Atmel的AVR UC3和基于ARM的SAM D20。KMX62G還通過(guò)了Windows 8和8.1認(rèn)證。
準(zhǔn)確的MagGyro算法實(shí)施起來(lái)相當(dāng)復(fù)雜。例如,平均信號(hào)可降低噪聲。但是,平均會(huì)花費(fèi)時(shí)間,從而影響等待時(shí)間和響應(yīng)能力。為了最大程度地提高準(zhǔn)確性,Kionix利用了可動(dòng)態(tài)調(diào)整平均值的自適應(yīng)軟件。當(dāng)系統(tǒng)運(yùn)行迅速且較小的錯(cuò)誤不太明顯時(shí),平均會(huì)減少以提高響應(yīng)速度。同樣,當(dāng)移動(dòng)較小且響應(yīng)性不太重要時(shí),平均會(huì)增加以提高準(zhǔn)確性。根據(jù)當(dāng)前使用系統(tǒng)的方式,這可提供最佳的用戶體驗(yàn)。
對(duì)人類(lèi)用例的關(guān)注是Kionix為其KMX62G MagGyro提供的價(jià)值的一部分。它在人類(lèi)感知和用戶體驗(yàn)應(yīng)用方面表現(xiàn)出色。它通過(guò)權(quán)衡一些性能來(lái)做到這一點(diǎn),從而提高了用戶的體驗(yàn)。通過(guò)設(shè)計(jì)其算法以提供高質(zhì)量的體驗(yàn),Kionix使KMX62G能夠以經(jīng)濟(jì)高效的方式將新功能帶入全新的應(yīng)用領(lǐng)域。
評(píng)估傳感器融合算法時(shí)要考慮的另一個(gè)因素是數(shù)據(jù)處理要求。要考慮的關(guān)鍵指標(biāo)是MIPS,代碼空間和RAM空間。消耗過(guò)多系統(tǒng)資源的算法實(shí)際上會(huì)增加系統(tǒng)成本。如果它們對(duì)主機(jī)處理器或傳感器集線器造成過(guò)多負(fù)擔(dān),它們甚至可能影響設(shè)備的主要功能并降低整體用戶體驗(yàn)。在軟件加載方面,MagGyro算法需要少于3個(gè)MIPS。此外,它可以在具有低至128 KB閃存和32 KB RAM的系統(tǒng)上運(yùn)行。這是傳感器校準(zhǔn),磁異常抑制,傳感器融合和合成陀螺儀計(jì)算所需的全部。對(duì)于能夠提供9軸數(shù)據(jù)(包括陀螺儀功能)的價(jià)值而言,這是一個(gè)合理的負(fù)擔(dān)。
隨著KMX62G MagGyro的問(wèn)世,現(xiàn)在可以從陀螺儀功能中受益的下一代消費(fèi)電子系統(tǒng)是一種經(jīng)濟(jì)高效的選擇。通過(guò)權(quán)衡適當(dāng)?shù)男阅芩剑c基于物理陀螺儀的系統(tǒng)相比,KMX62G具有更低的成本,更高的電源效率和更小的占位空間。
編輯:hfy
-
傳感器
+關(guān)注
關(guān)注
2566文章
53008瀏覽量
767528 -
陀螺儀
+關(guān)注
關(guān)注
44文章
848瀏覽量
100035 -
加速度計(jì)
+關(guān)注
關(guān)注
6文章
728瀏覽量
46874
發(fā)布評(píng)論請(qǐng)先 登錄
**無(wú)人機(jī)飛控如何靠三軸MEMS陀螺儀實(shí)現(xiàn)穩(wěn)定飛行?**
MEMS陀螺儀正在取代光纖陀螺儀?
MEMS陀螺儀如何成為無(wú)人機(jī)精準(zhǔn)飛行的核心引擎?
低成本MEMS陀螺儀,如何挑戰(zhàn)工業(yè)級(jí)精度?

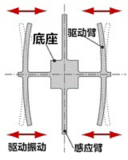
振動(dòng)陀螺儀傳感器的工作原理
陀螺儀在鉆井或測(cè)井中有何用途?

MEMS陀螺儀的尋北原理是什么?精度如何?

“MEMS陀螺儀”小到極致,穩(wěn)如磐石!

深度解析:IMU陀螺儀芯片從6軸到9軸陀螺儀傳感器融合的技術(shù)革新

智能關(guān)停,高速風(fēng)筒方案中陀螺儀技術(shù)的精準(zhǔn)應(yīng)用

MCXN947怎么驅(qū)動(dòng)FRDM-STBI-A8974三軸陀螺儀?
愛(ài)普生XV7021BB陀螺儀傳感器在人機(jī)交互中的應(yīng)用

國(guó)產(chǎn)士蘭微MEMS六軸陀螺儀介紹
優(yōu)可測(cè)白光干涉儀:激光陀螺儀提升良率與精度的關(guān)鍵
愛(ài)普生(EPSON) 慣性測(cè)量單元(IMU)、陀螺儀傳感器等模塊應(yīng)用領(lǐng)域選型介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論