 繪圖機器人DIY圖解
繪圖機器人DIY圖解

第1步:所需材料


就像我以前的項目一樣,除了控制器電機和車輪之外,大部分的東西都是垃圾。
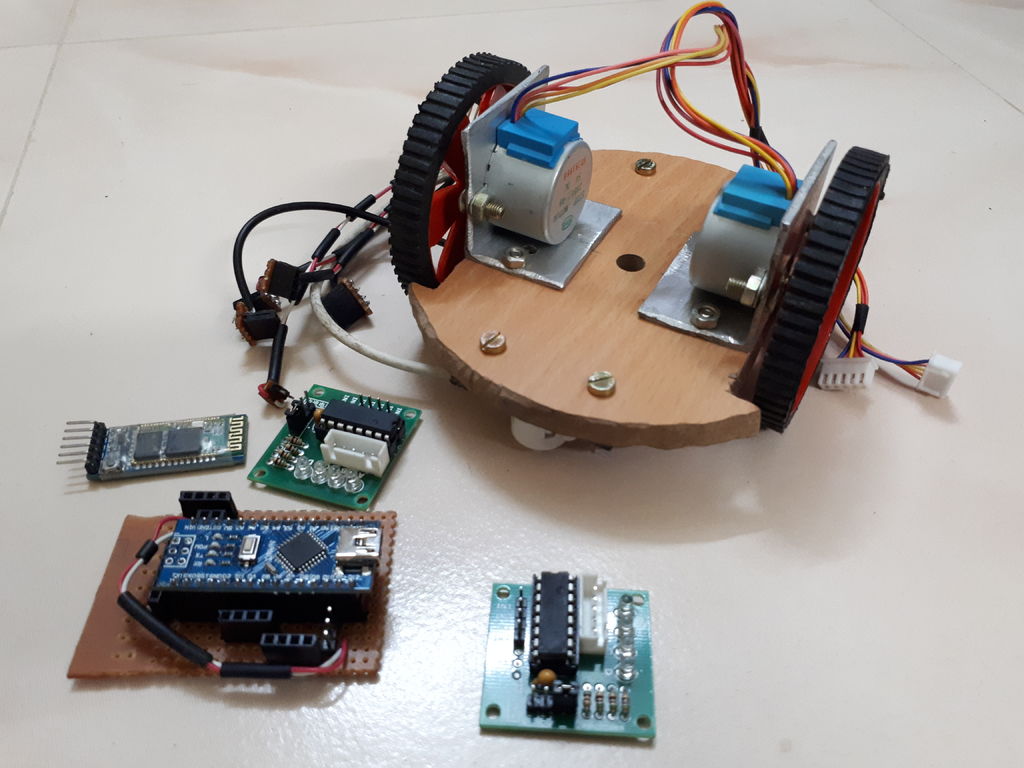
所需材料
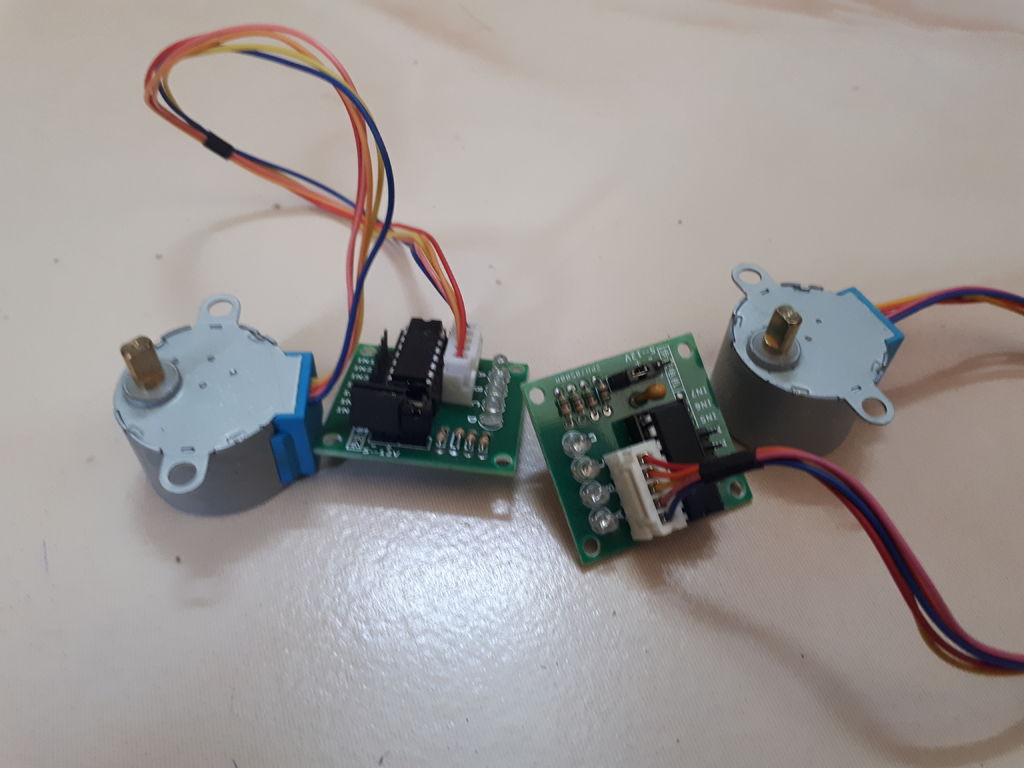
1)帶有uln2003驅動器的28byj-48步進電機 - 2號
2)Arduino Nano - 1No 。
3)Tower pro servo sg90 - 1No。
4)HC-05藍牙模塊。
5)步進電機輪 - 2號
6)腳輪 - 2號。
7)素描筆
8)螺絲和螺母。
9)電容器470微法。
除了上述所有垃圾之外
9)膠合板12 CM X 12 CM。
10)鋁喂料廢物。
11)CD盒。
12)舊塑料齒輪。
使用的軟件
1)Arduino IDE。
2)Visual Studio 10.
使用的工具
1)鉆孔機。
2)焊接離子。
3)鋼鋸片。
4)螺絲刀。
第2步:構建視頻
單視頻中的完整構建請參閱視頻或詳細了解步驟。
步驟3:底盤構造和車輪固定

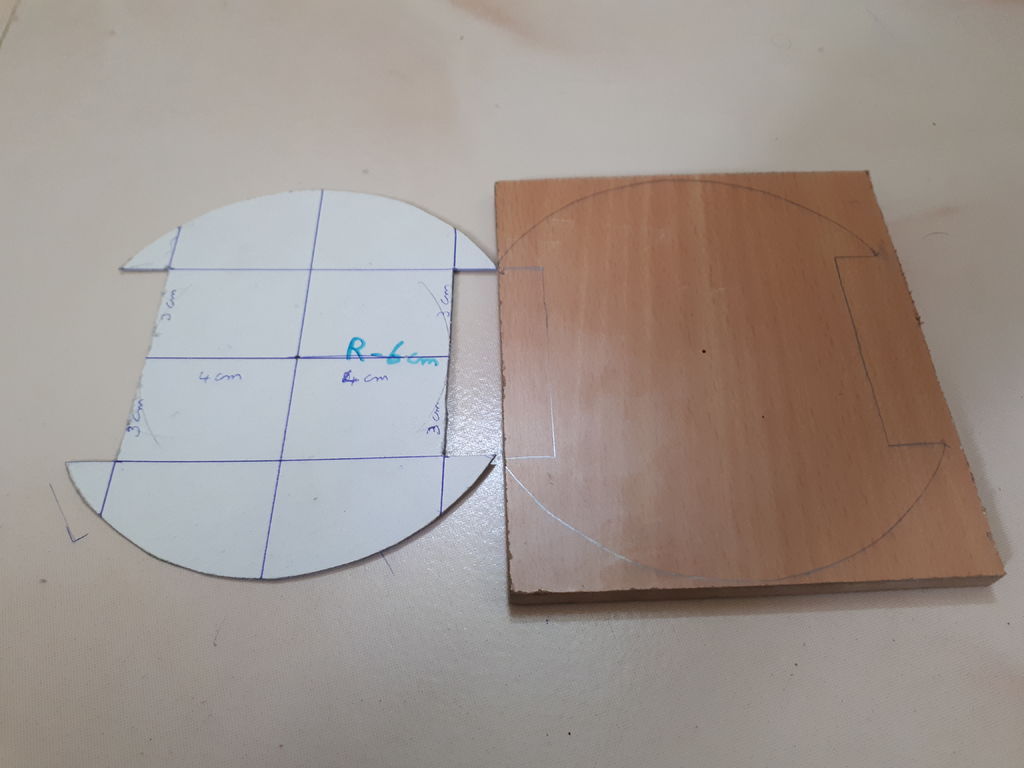








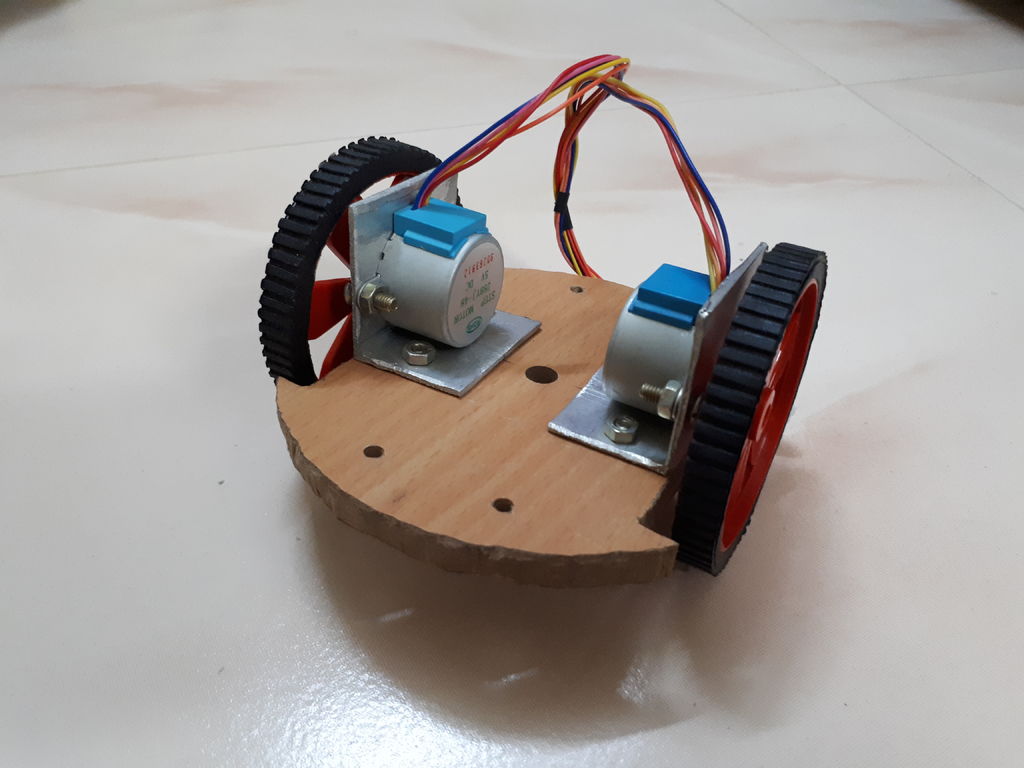

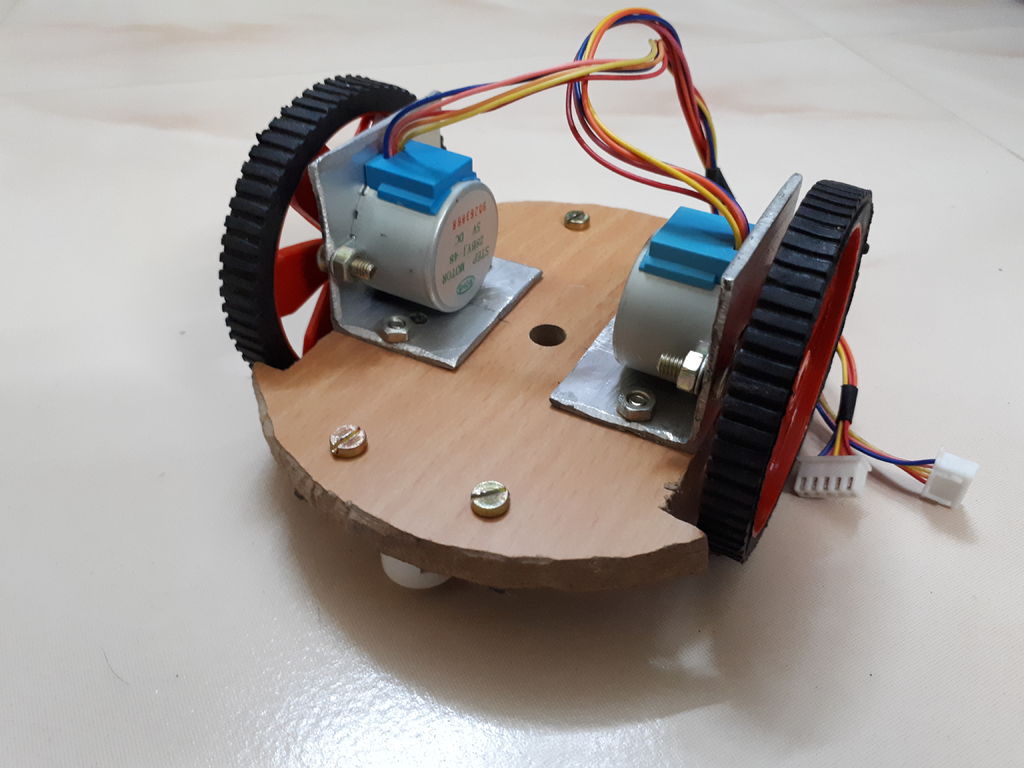
圖像是自我解釋的,我仍在敘述一些單詞
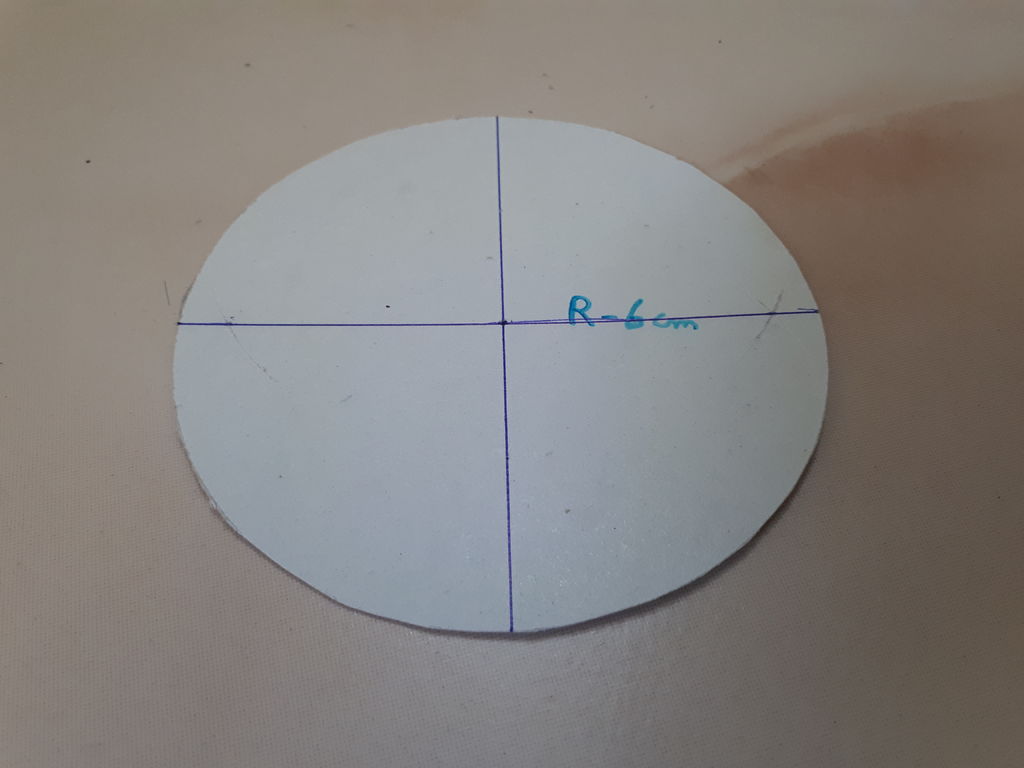
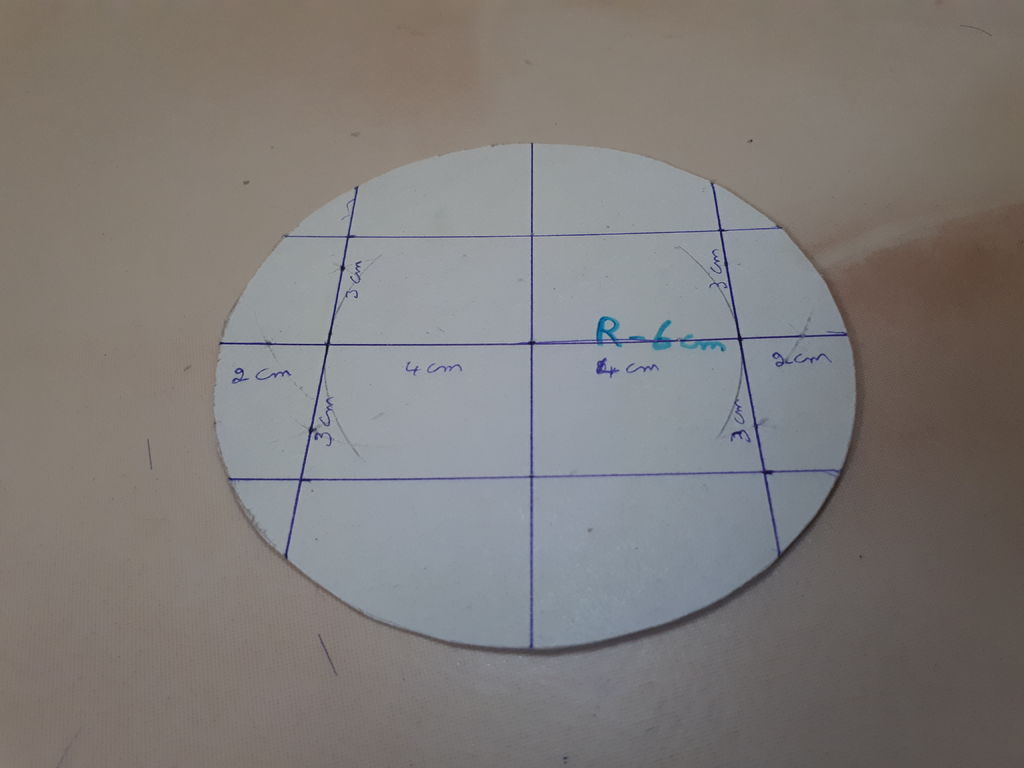
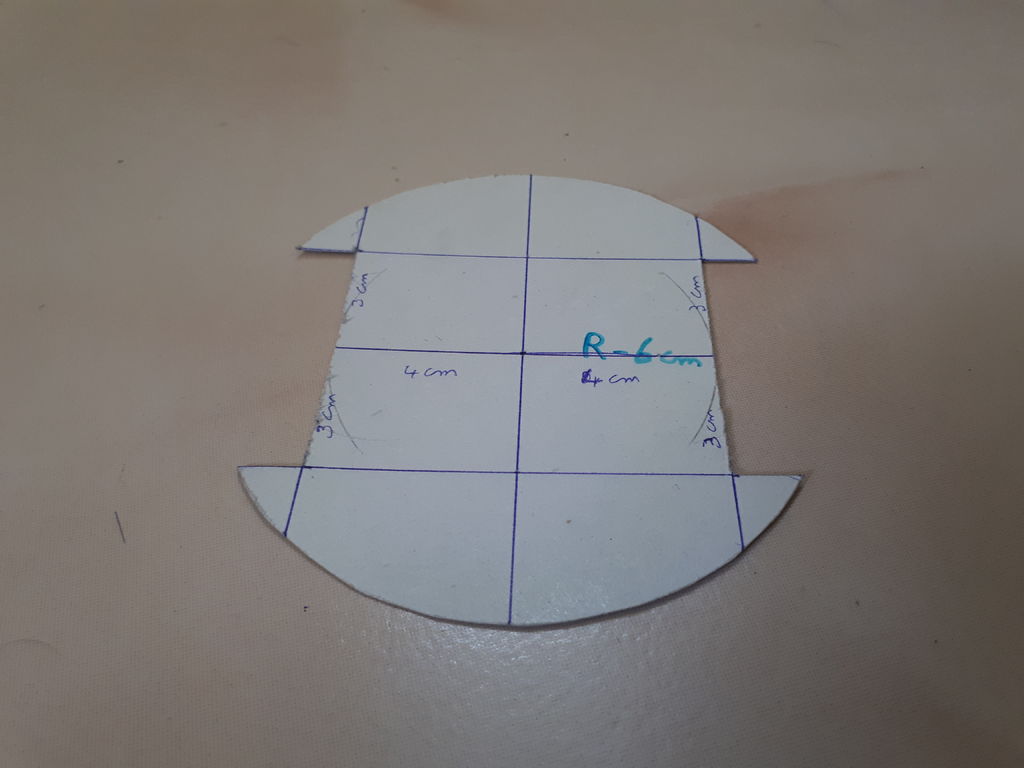
1)它是一個非常小的機器人,只有6厘米半徑(直徑12厘米)。首先在紙上繪制圓圈并標記輪子部分并剪切紙張。
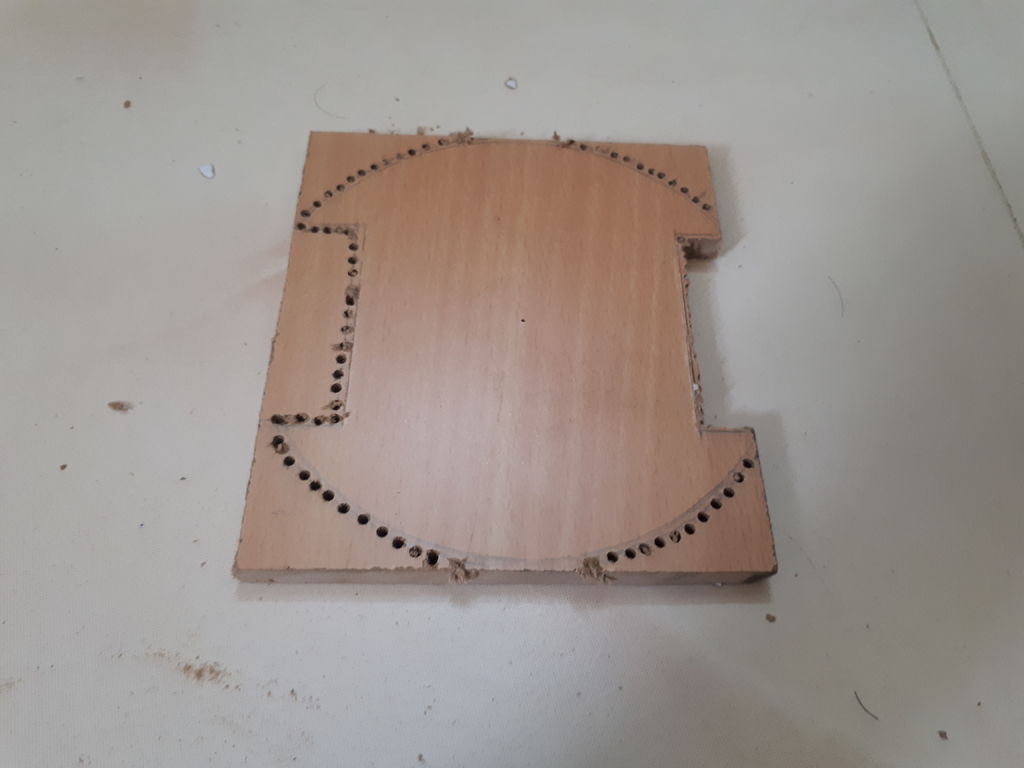
2)將紙張放在膠合板上并繪制底盤輪廓。由于我沒有木材切割機,我用相等的空間鉆出外線并去掉多余的碎片。
3)用刀子雕刻兩側并使其拋光。
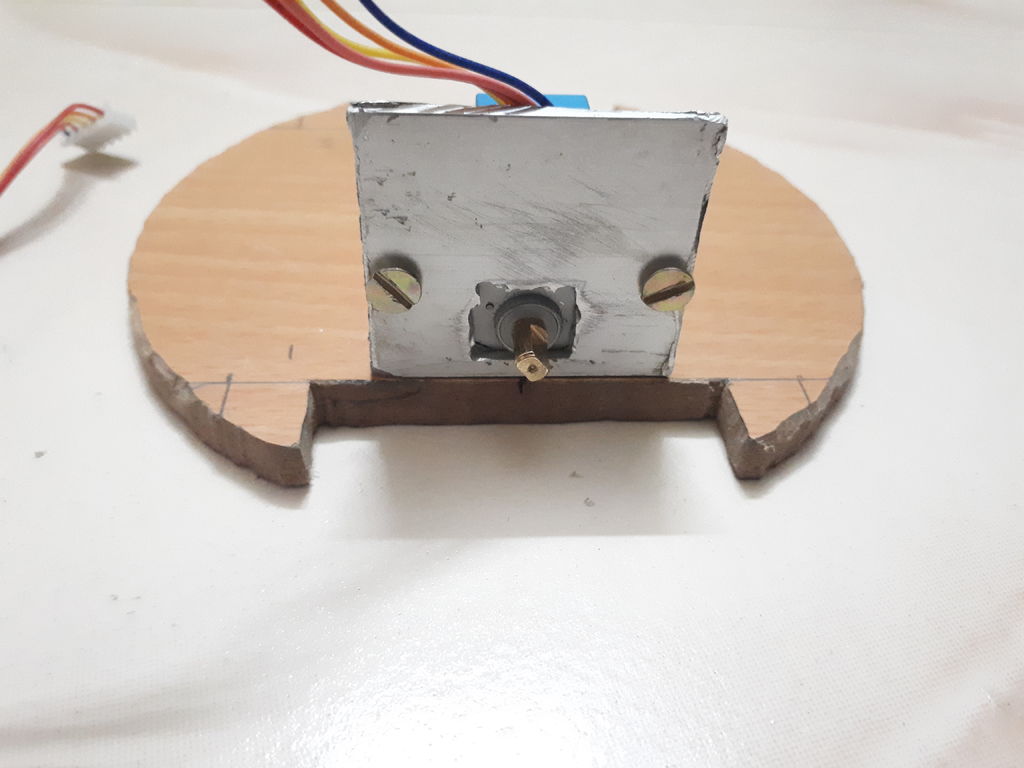
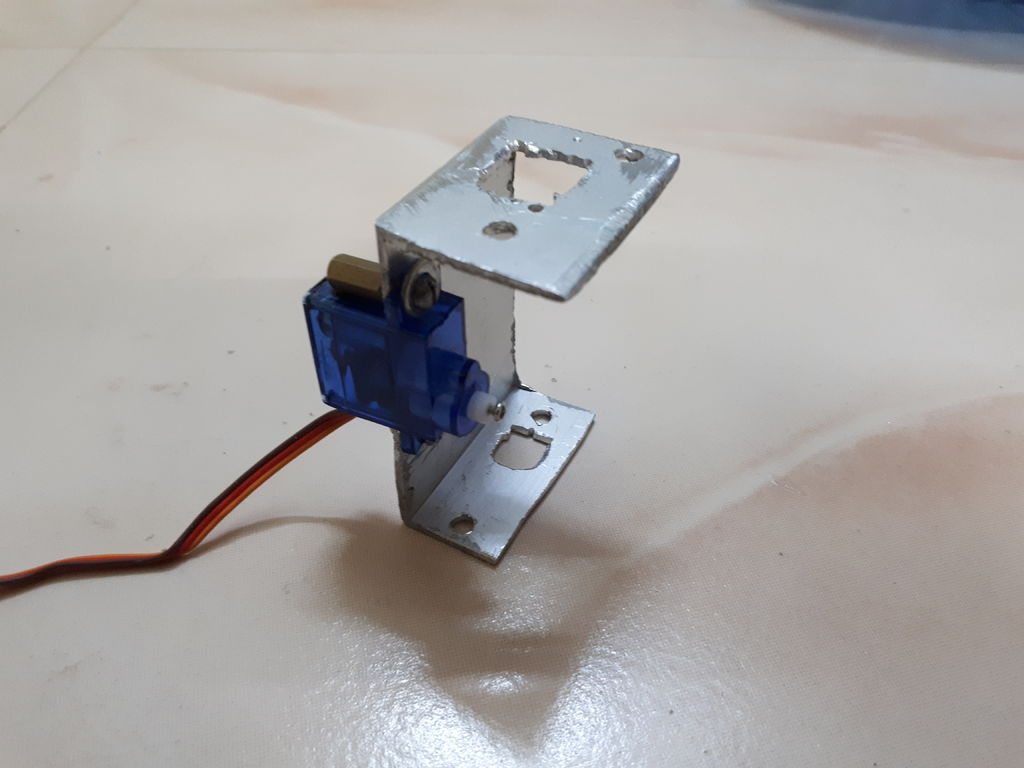
4)現在使用黑客鋸將方形鋁進料管切割成L形。
5)標記L形進料孔,以適合步進電機。再次放置孔并切割鋁片(需要花費更多時間,因為用手工作時鋁的重量較輕)。
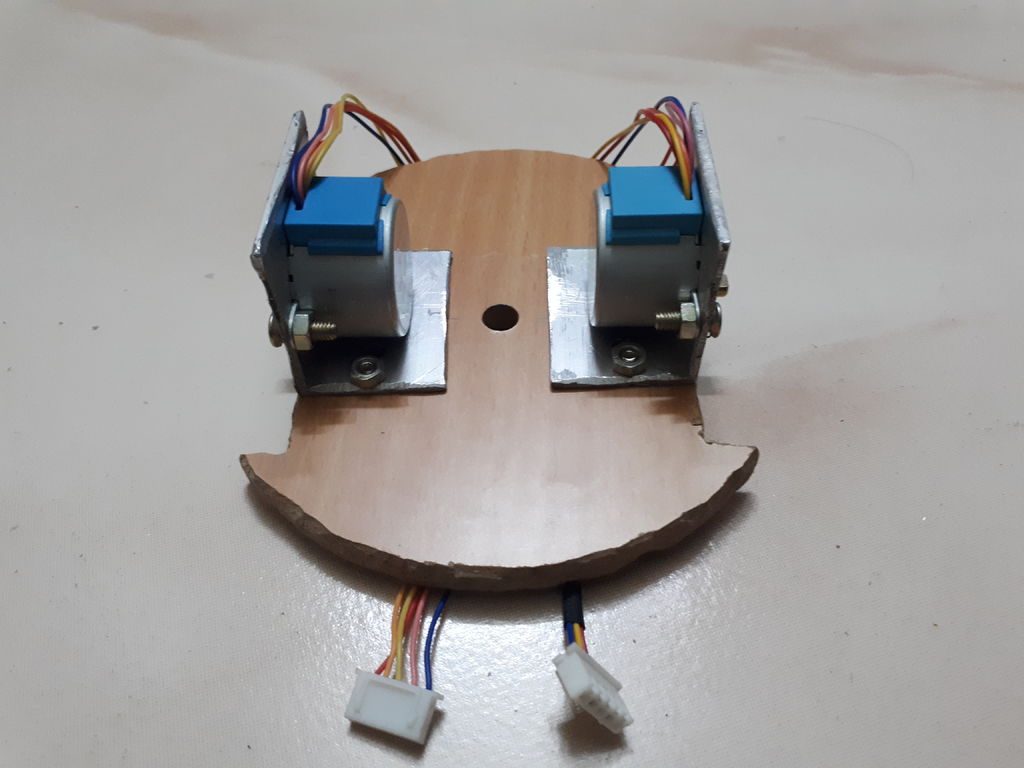
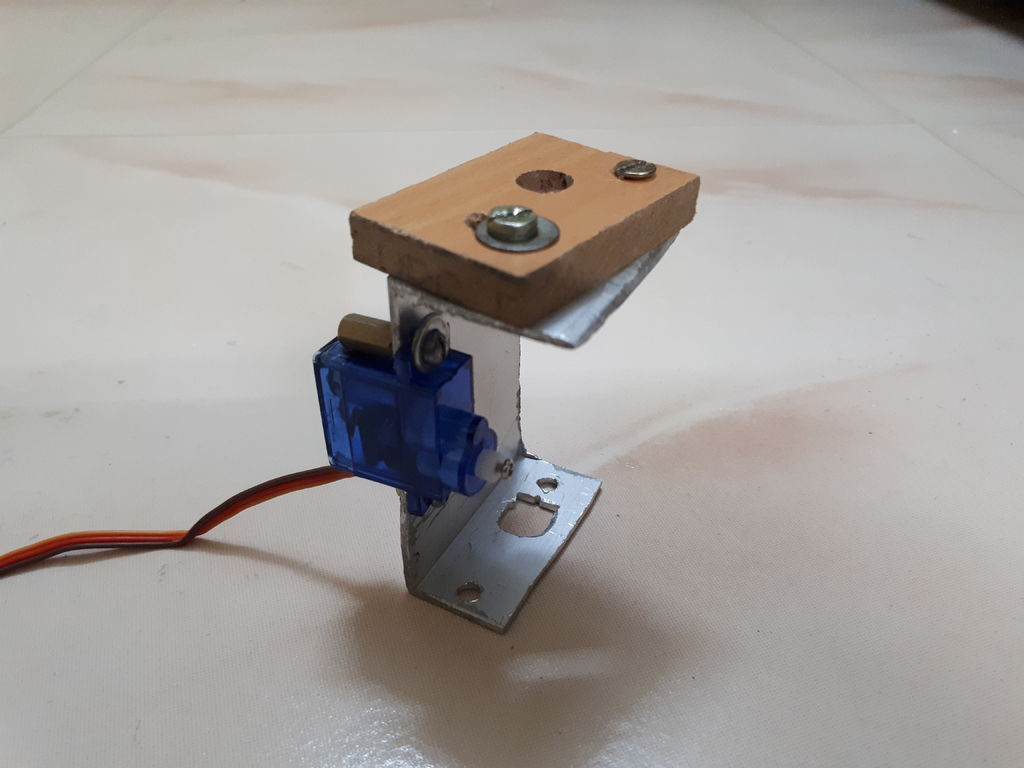
6)現在使用螺絲和L形鋁合金喂入游戲木底座堅果。現在將步進電機擰入機箱中。
7)為腳輪做一個底座并用底盤固定。
8)在正確的中心放一個10mm的孔底盤供將來使用。
注意: - 步驟非常簡單,但所有人都希望處于適當的尺寸和正確的位置,即使小的mm變化也會使繪圖發生很大的變化。
步驟4:電路規劃
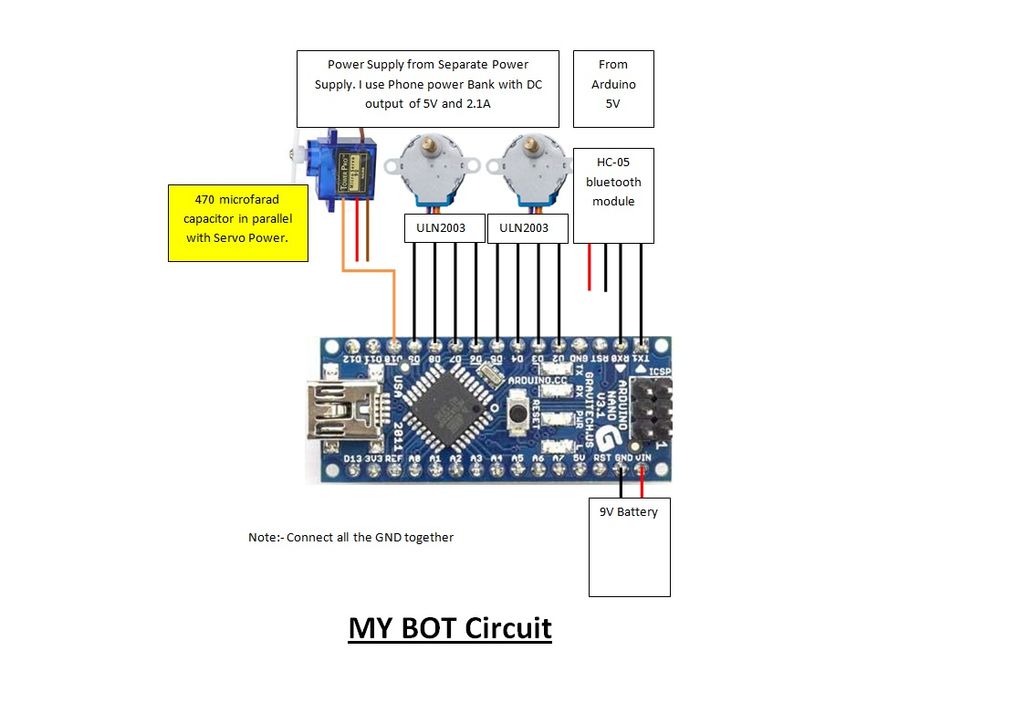
以上是電路圖
1)使用Arduino TX和RX與HC05藍牙通信。請記住,當程序上傳HC05必須刪除其他明智的我們無法上傳程序。
2)步進器的用戶數字引腳(2,3,4,5)和(6,7,8,9)發動機。通過ULN2003驅動器將引腳連接到步進電機。
3)將伺服電機連接到數字引腳10.
4)步進電機和伺服電機分開供電。我使用的是具有5V 2.1A輸出的移動電源。
5)用于Arduino的9V電池和用于HC05模塊的Arduino 5V電源。
6)使用并聯的470微法拉電容伺服電源停止伺服閃爍。
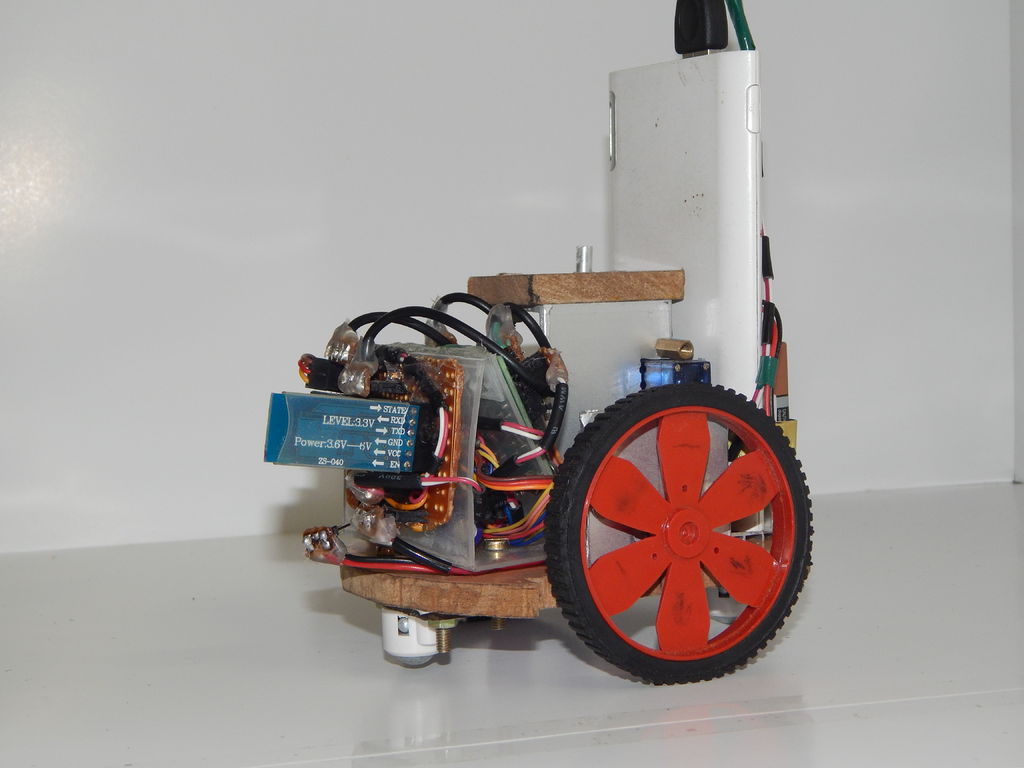
步驟5:電路完成
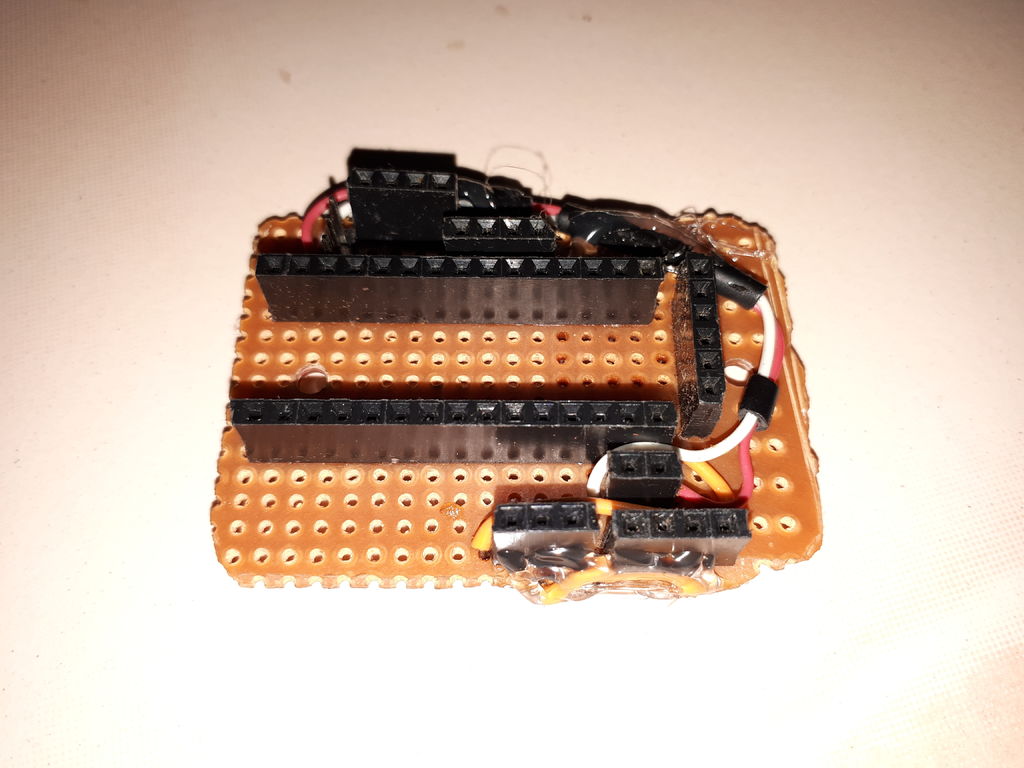
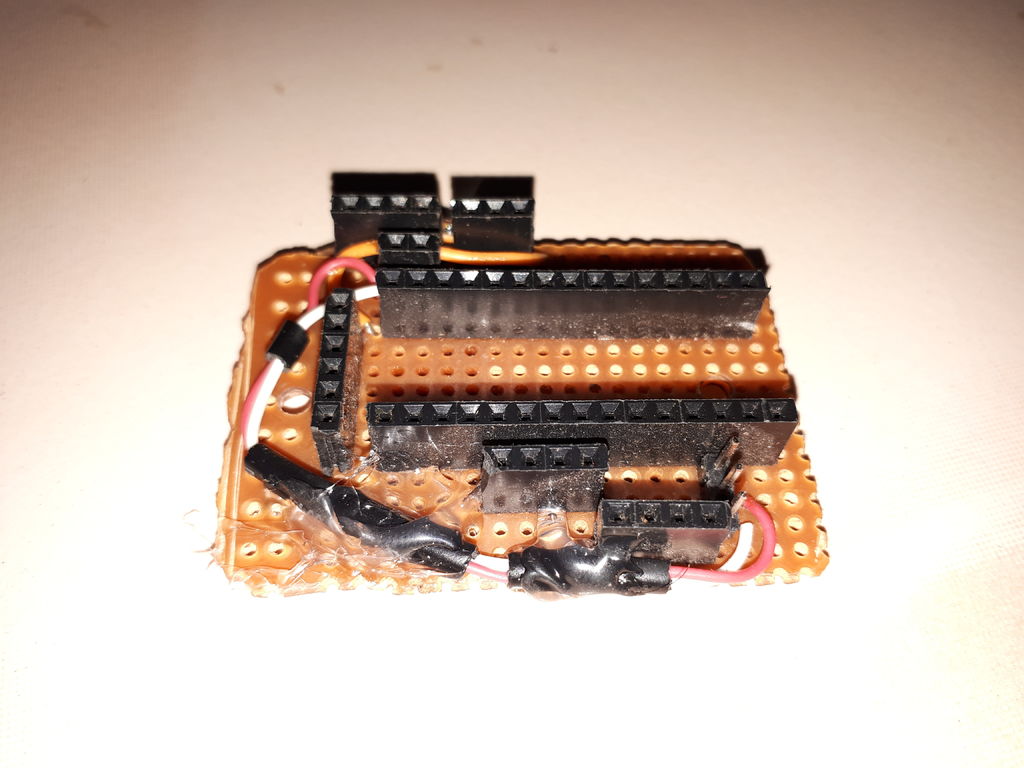
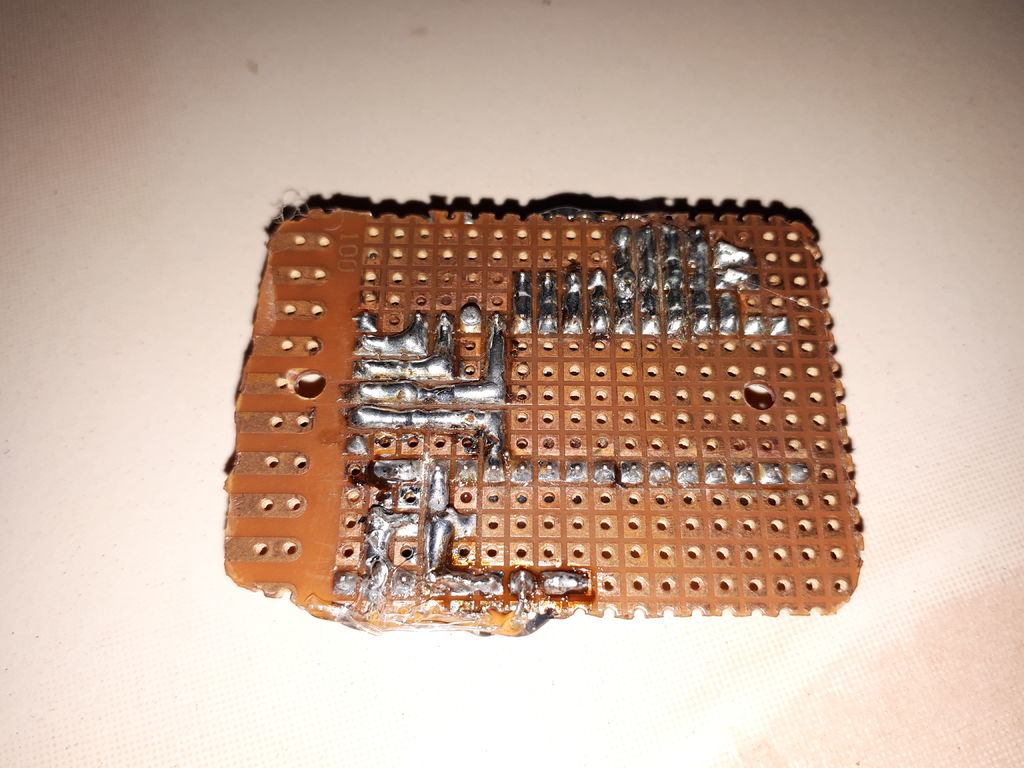
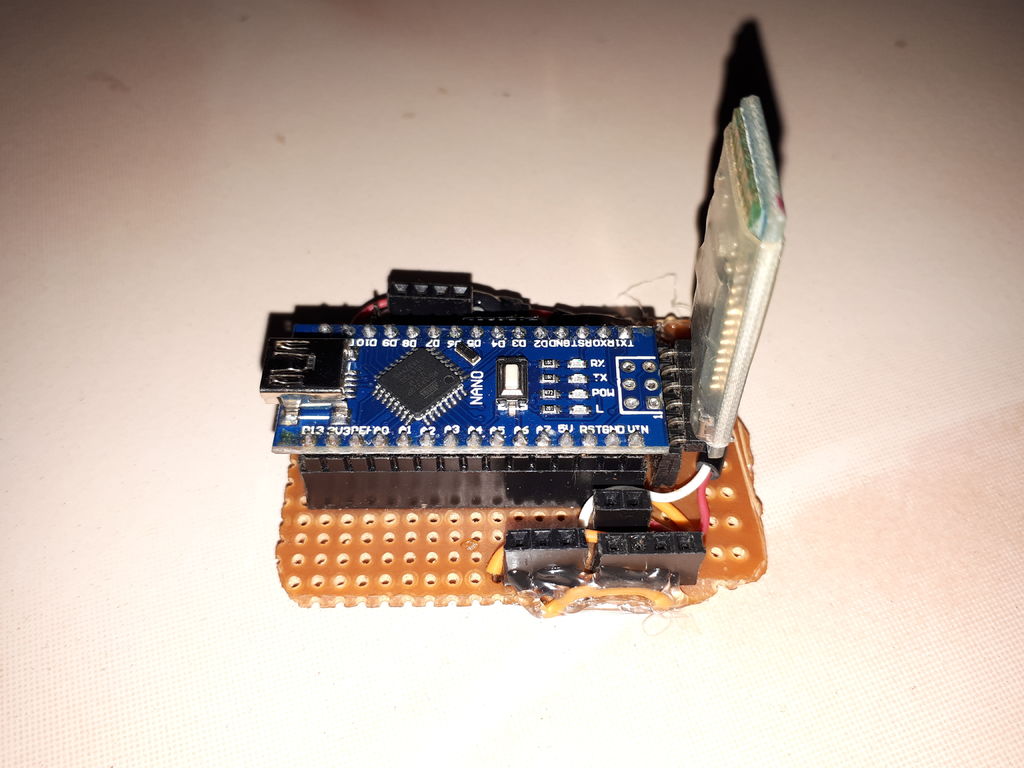
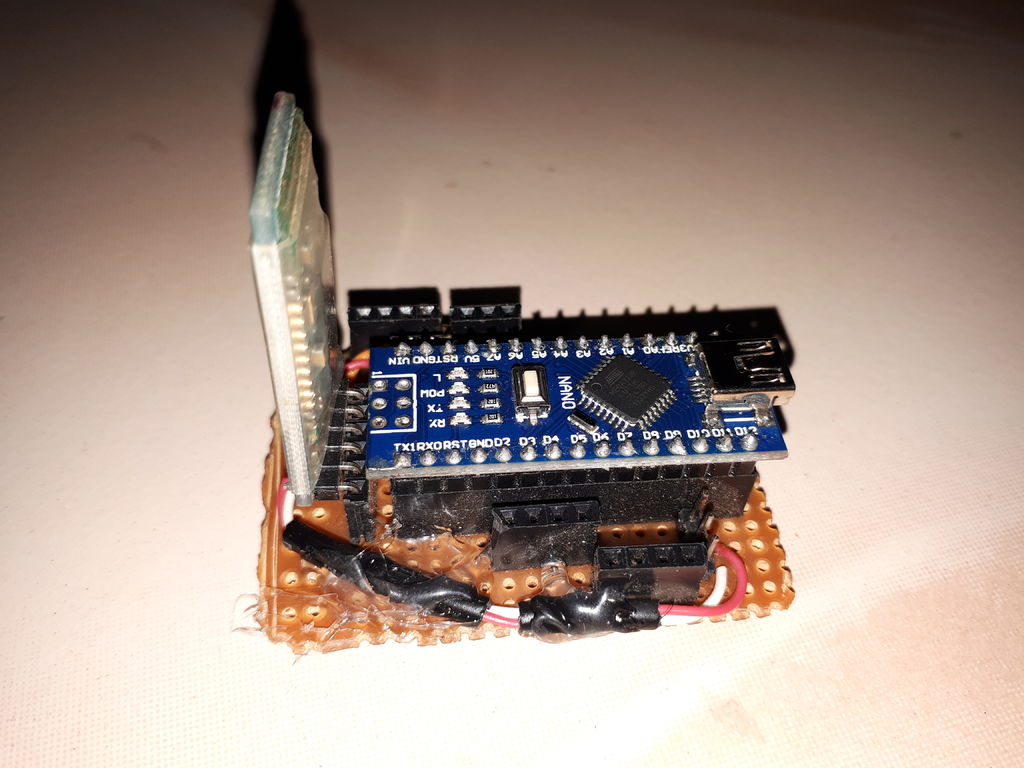

我制作一個像電路一樣的屏蔽罩都是用母頭和公頭連接器針手工焊接的。連接線也是自己制造的。別忘了放兩種不同的電源,因為我需要3天才能找到問題。將所有電源gnd連接到arduino gnd。
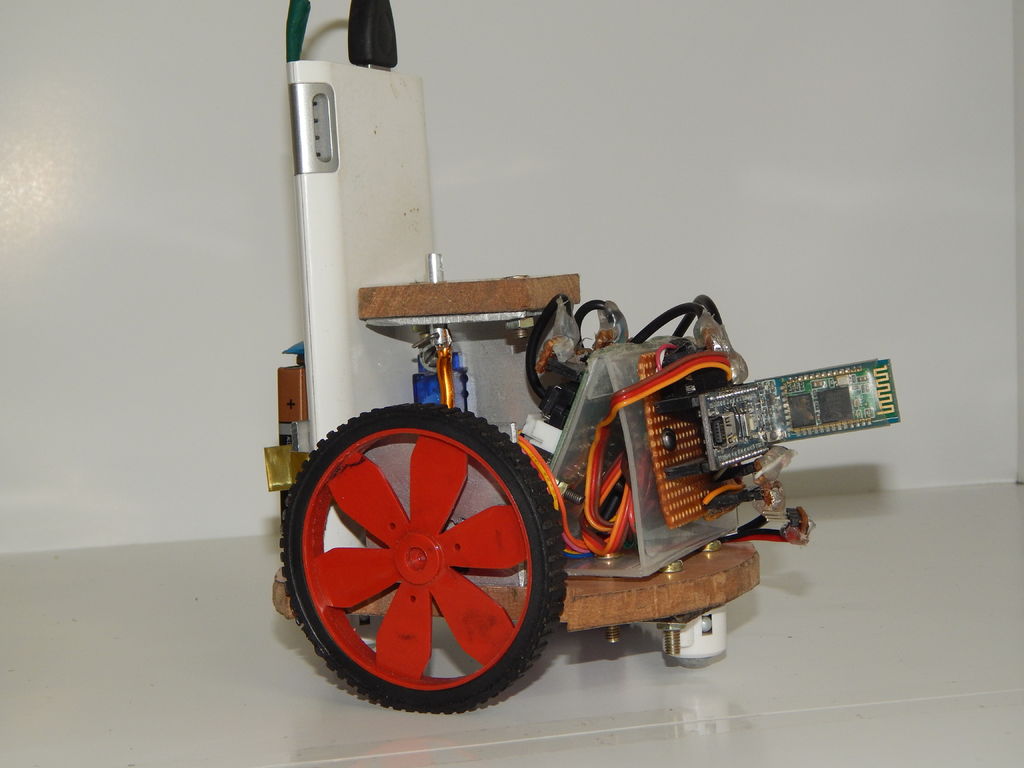
步驟6:完成Bot


1)將電路與機箱連接,我使用舊CD盒制作三角形底座并修復一側是電路,另一側是電機驅動器。
2)現在使用Arduino藍牙RC車載應用來測試機器人。
3)將移動電源連接到Arduino電源。只有移動電源足以支持Arduino,藍牙和步進。
檢查機器人的Arduino程序如上所述
步驟7:Pen Up Down機制

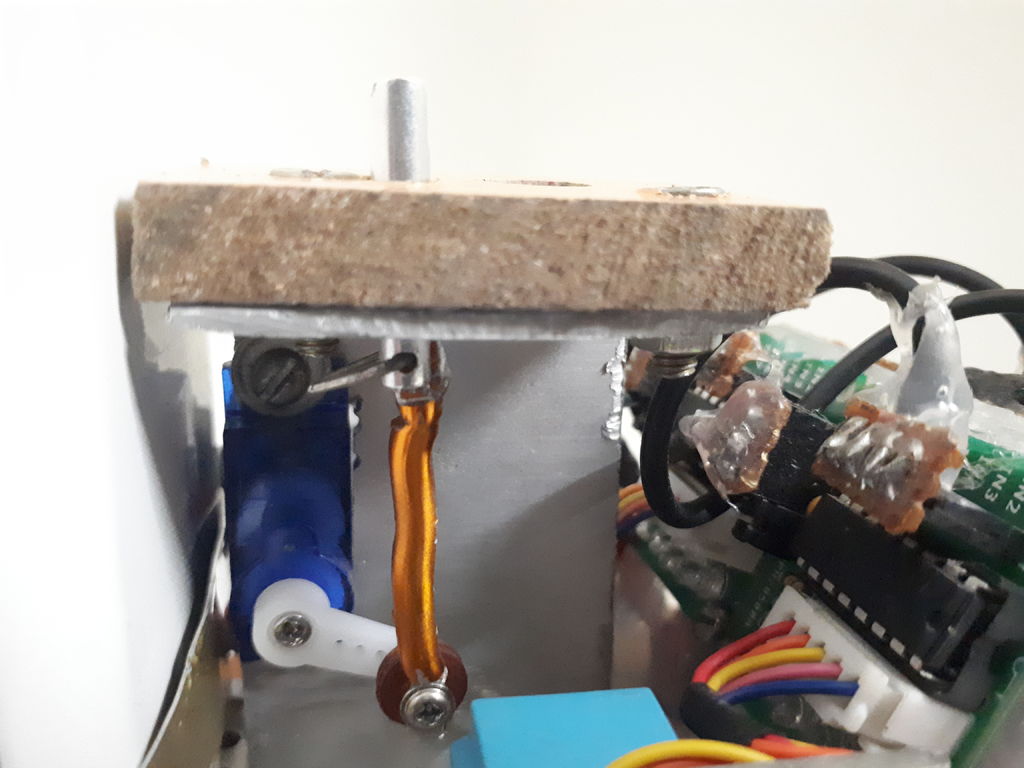

1)經過大量修改,我完成了上述筆快速更換筆的向上機構。
2)我使用連桿上下拉桿上下提升筆。
3)在草圖筆上使用舊齒輪以獲得重量和提升機制。
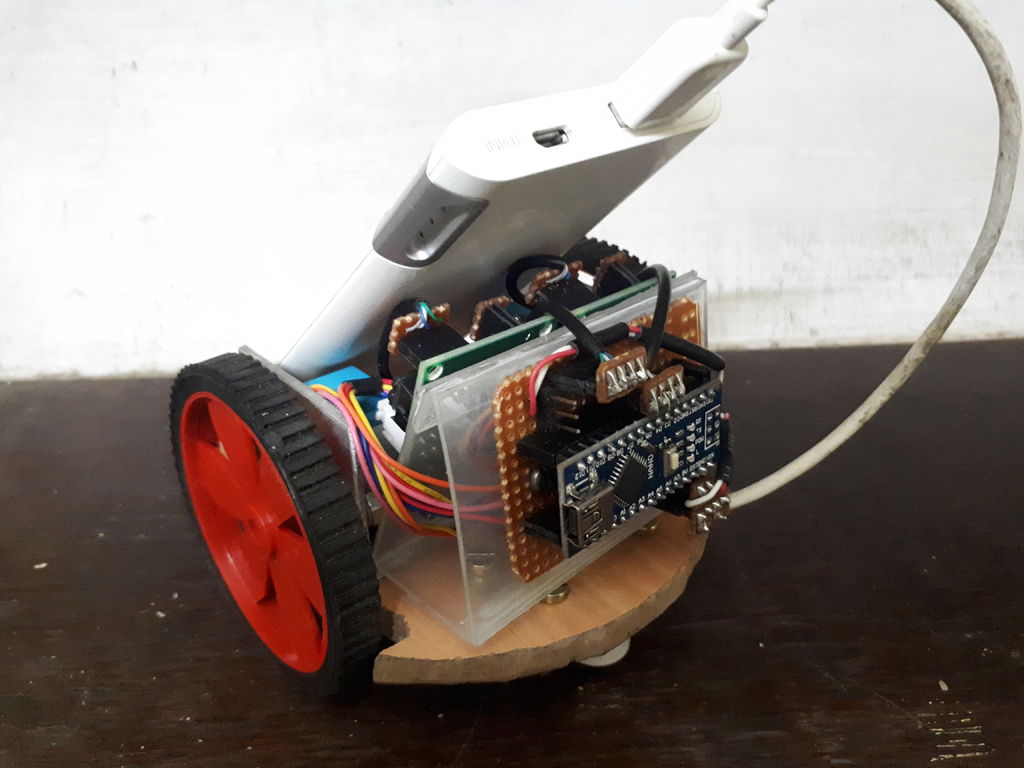
步驟8:完成Bot
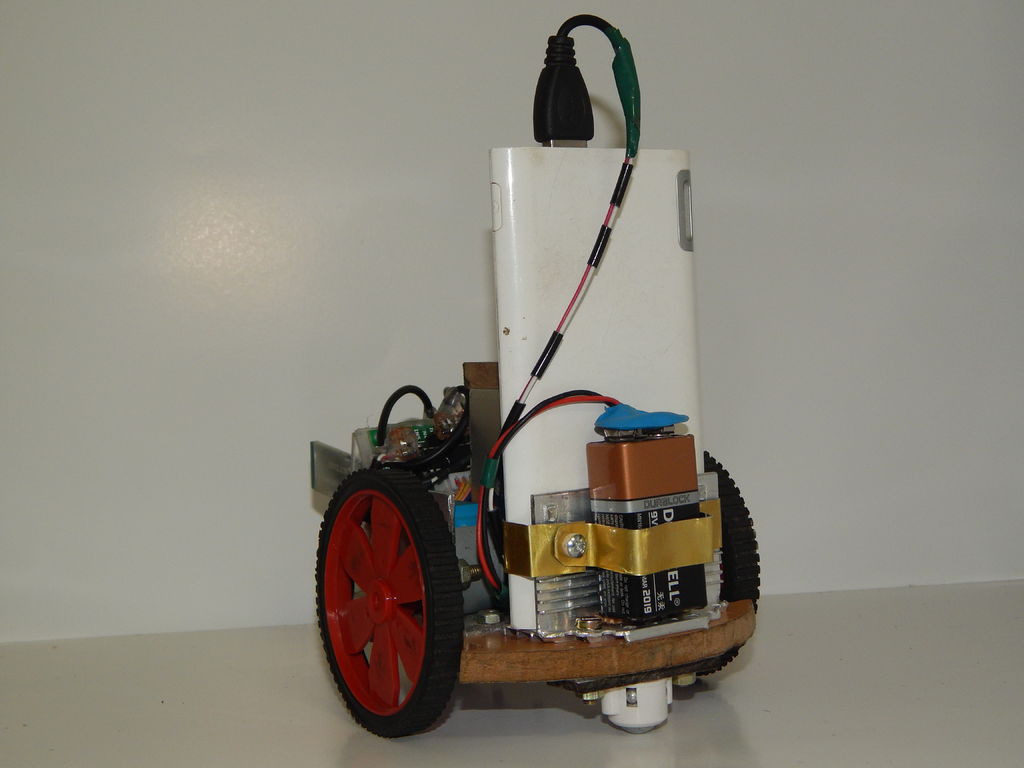

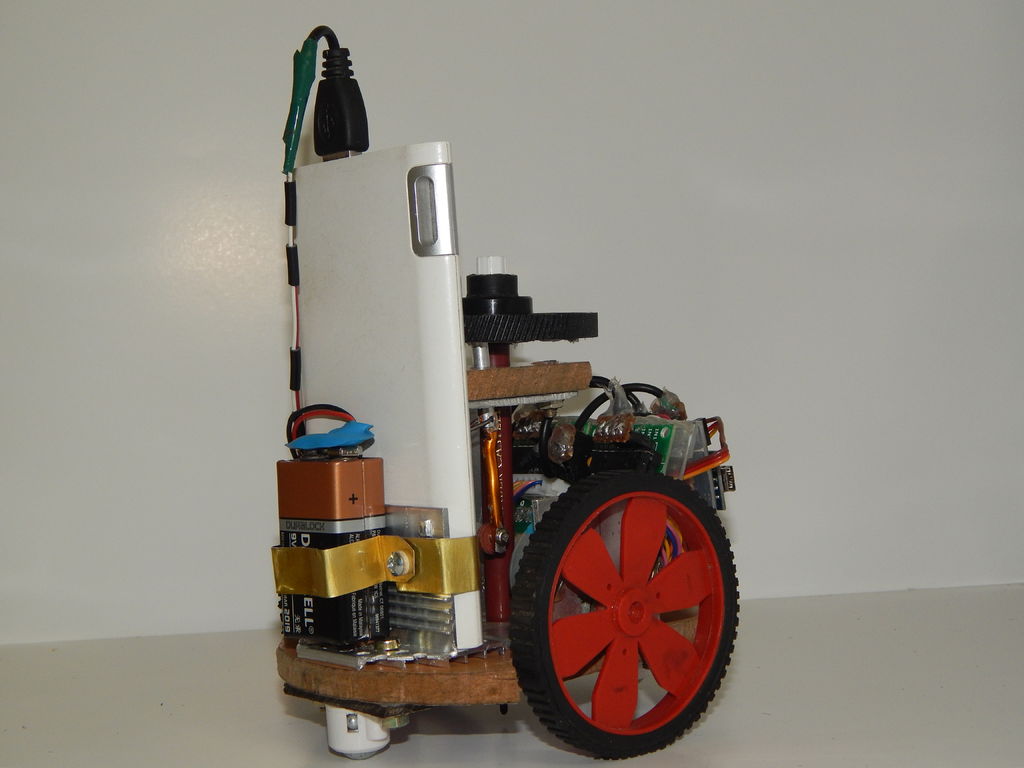
修理電池和移動電源我將舊的噴霧瓶和永久性的狐貍切開。現在基礎工作已經完成,步進電機驅動的機器人已準備就緒。
第9步:機器人數學
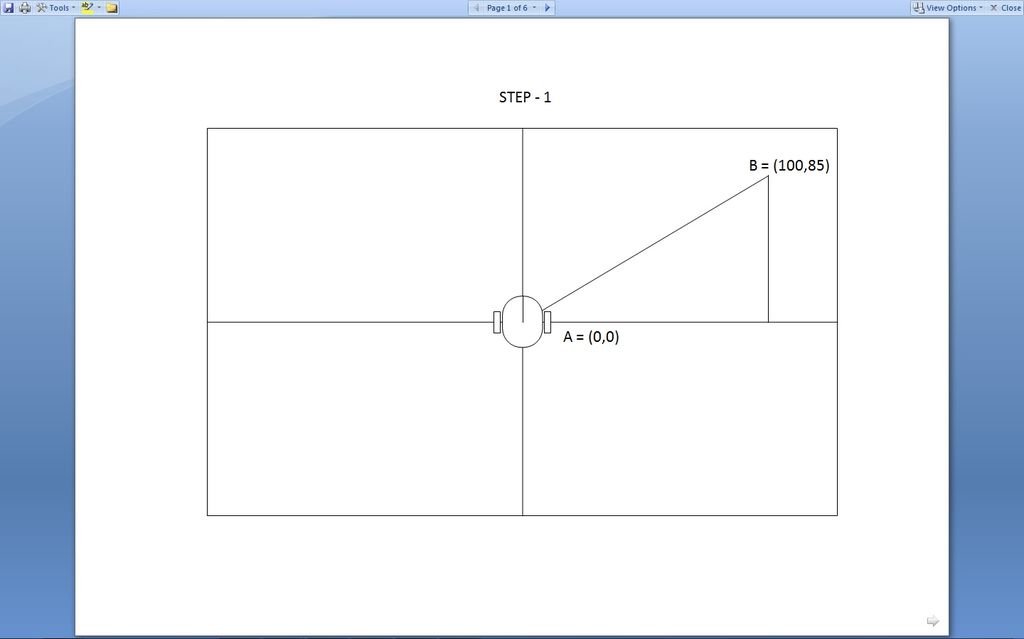
圖中詳細介紹了步驟。
1)程序的主要部分是計算機器人想要轉動的旋轉方向和它想要移動的距離。想想每次機器人位于圖表的中心時,我們都有當前的位置和想要移動的位置。因此每個點都有一個X,Y位置,我們擁有機器人面臨的當前程度。在開始時,機器人面向0度,它有359度旋轉并朝那個方向移動。
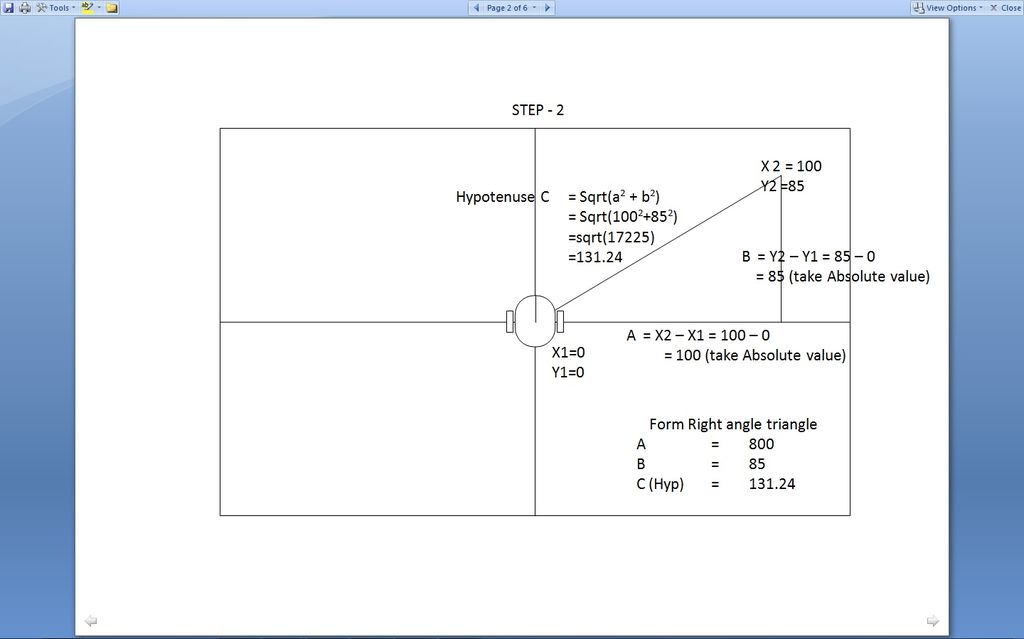
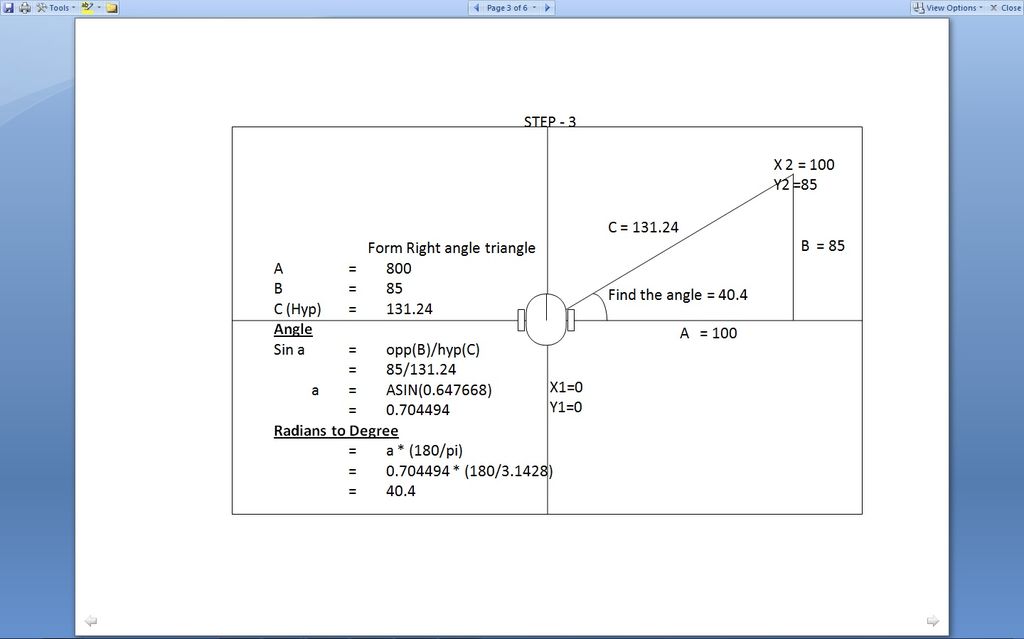
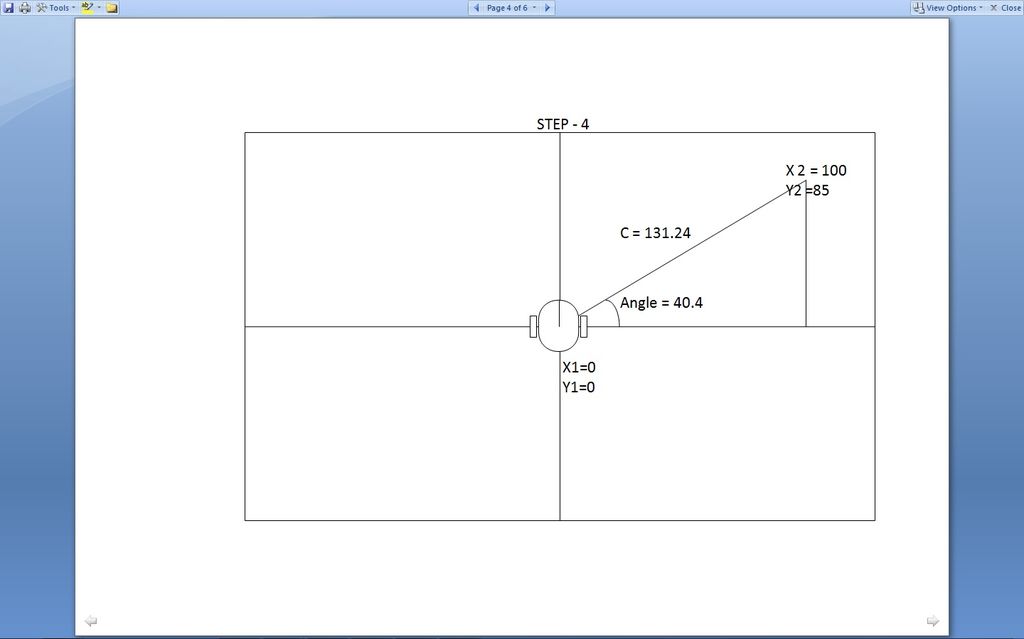
2)因此,對于當前位置和要移動的位置,按照步驟2找到寬度(a)和高度(b)并形成直角三角形。即使價值為負,也要絕對。使用Hypotenuse公式找到Hyp。
3)使用帶有Hyp和B(對側)的trignamentry公式查找度數。將弧度轉換為度數。
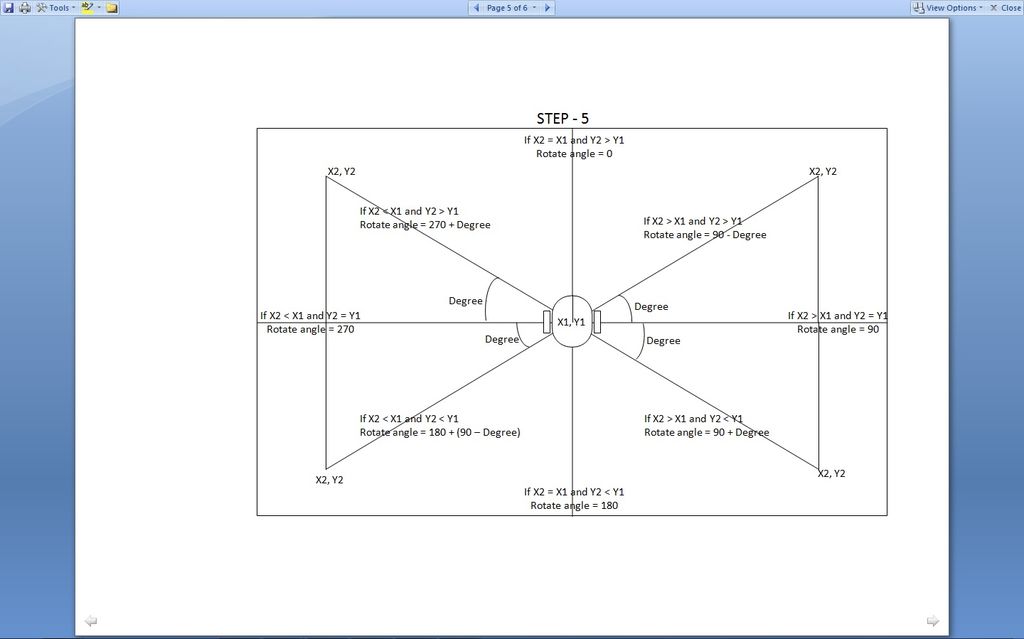
4)現在我們得到了距離想要移動的距離,并且我們得到了點所在的度數。只有在旋轉后才會移動。要計算Bot旋轉角度用戶步驟5.
5)步驟5有很多邏輯因為機器人在任何一方都有分數。因此,根據當前位置和下一個位置點位置計算旋轉角度。
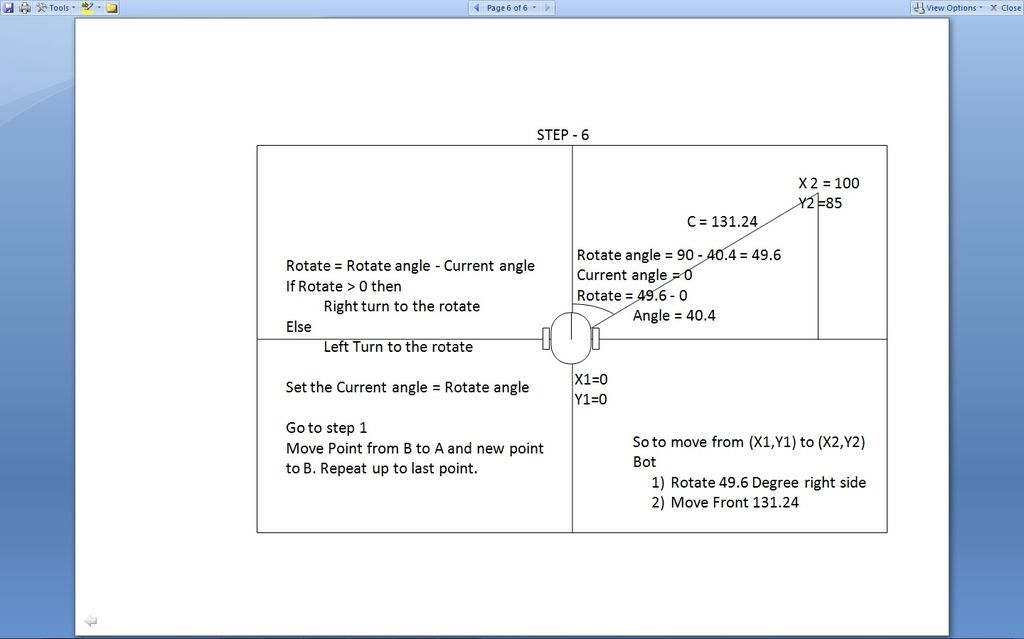
6)使用存儲器中的當前角度,根據步驟4找到旋轉角度和方向。現在按照計算旋轉左側或右側,并移動Hyp編號的步驟。現在將新點作為當前點并獲取下一個點并再次轉到步驟1
一次又一次地重復這些步驟直到程序完成。
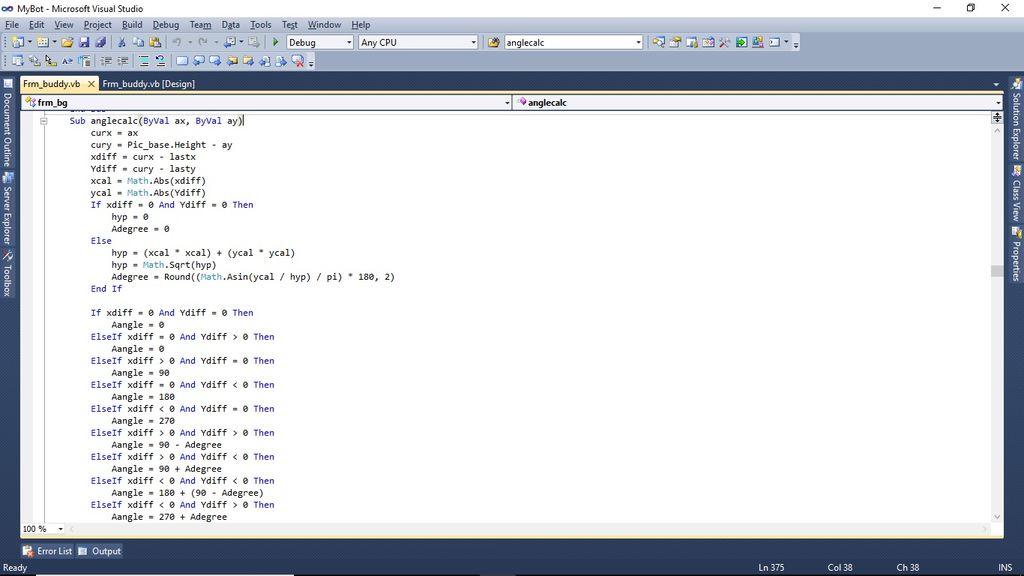
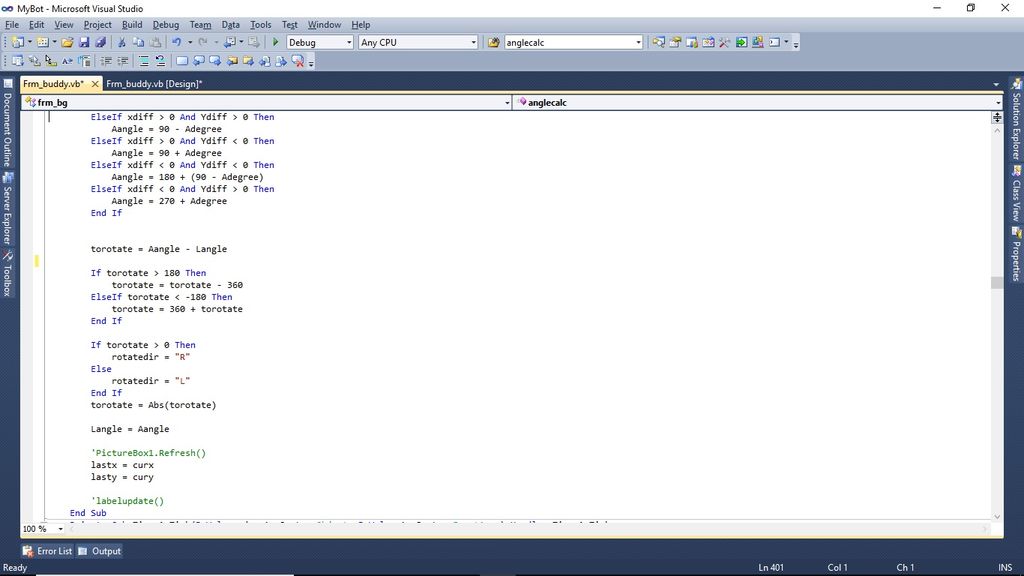
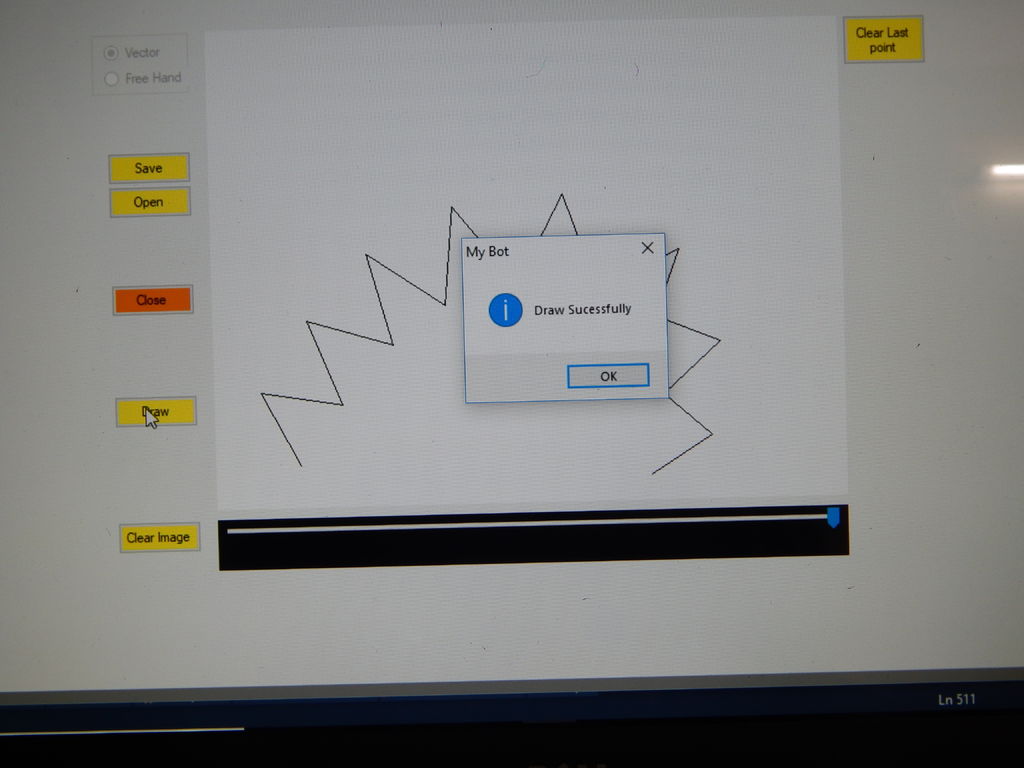
步驟10:VB.net 2010程序
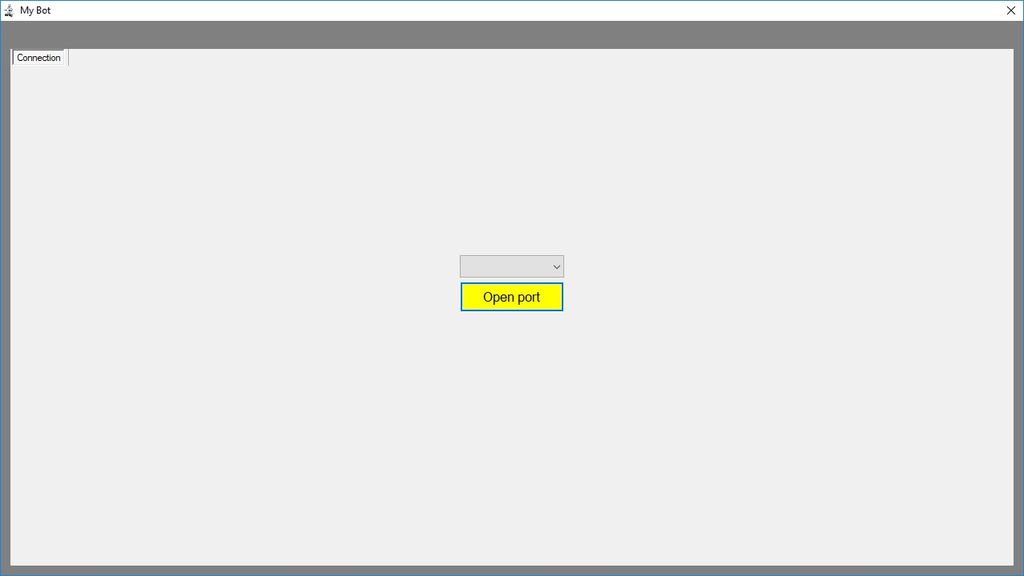
1)在Designer視圖中我們有兩個Tab控件。一個通過藍牙與Bot連接。另一個是繪圖窗口。
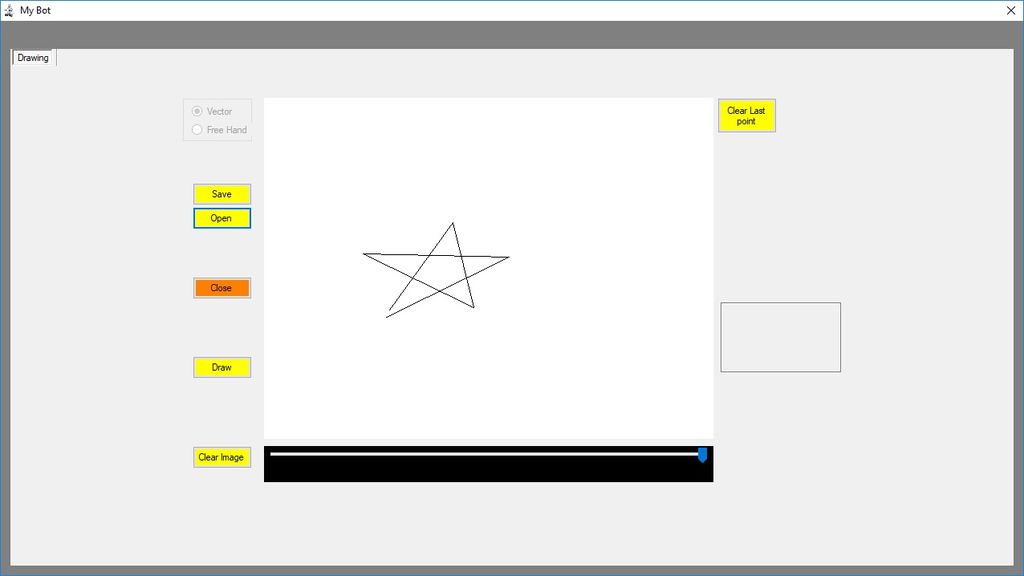
2)使用鼠標或手繪制繪圖的空白區域,我們可以保存繪圖并打開它。
3)左側的一個名為Draw的按鈕單擊可將圖片框中的圖像繪制到地板或紙張上。
4)上一張幻燈片的第5步程序在前兩張圖片中。
5)按下繪圖后,計算一個點和筆狀態并找到旋轉角度和行程距離,將其發送到機器人。一旦機器人到達該點,它就會回復并且下一個點根據發送點發送,圖像顯示在屏幕上。一旦它到達終點。最后一個位置到主頁輪換并指向發送到機器人。
6)在此頁面下載應用程序,解壓縮并安裝最新的.net框架并運行。
注意: - 首先,我使用逗號分隔符創建一個命令,并嘗試使用substr分割字符串,但如果長度很高,則在arduino中,字符串函數永遠不會工作。因此,逐步發送點。
步驟11:Arduino程序 - 計算脈沖數
當前Bot工作
1)所以現在如果兩個步進電機都朝相反方向旋轉,則機器人向前或向后移動。對于步進電機28byj-48,我們需要4096個脈沖進行一次完整旋轉。
2)如果向左或向右轉動同一方向。計算步進器想要旋轉一整圈的度數并將其除以360以找到1度的旋轉或從底盤中心找到輪子的中心并找到它的圓周除以輪周長。現在用這個結果乘以4096表示完全旋轉需要多少個脈沖。對于我的車輪和底盤,結果是5742脈沖并將其除以360,15.95脈沖進行1度旋轉。
步驟12:Arduino程序
在上一頁中,計算學位的步驟。旋轉方向,度數和移動距離由VB.net程序計算并通過藍牙發送。一旦數據以Starting字符“&”收到,結束字符為“$”,則子字符串拆分并通過旋轉電機和伺服器執行命令。完成后,將“@”符號回復給筆記本電腦。
步驟13:MyBot準備就緒

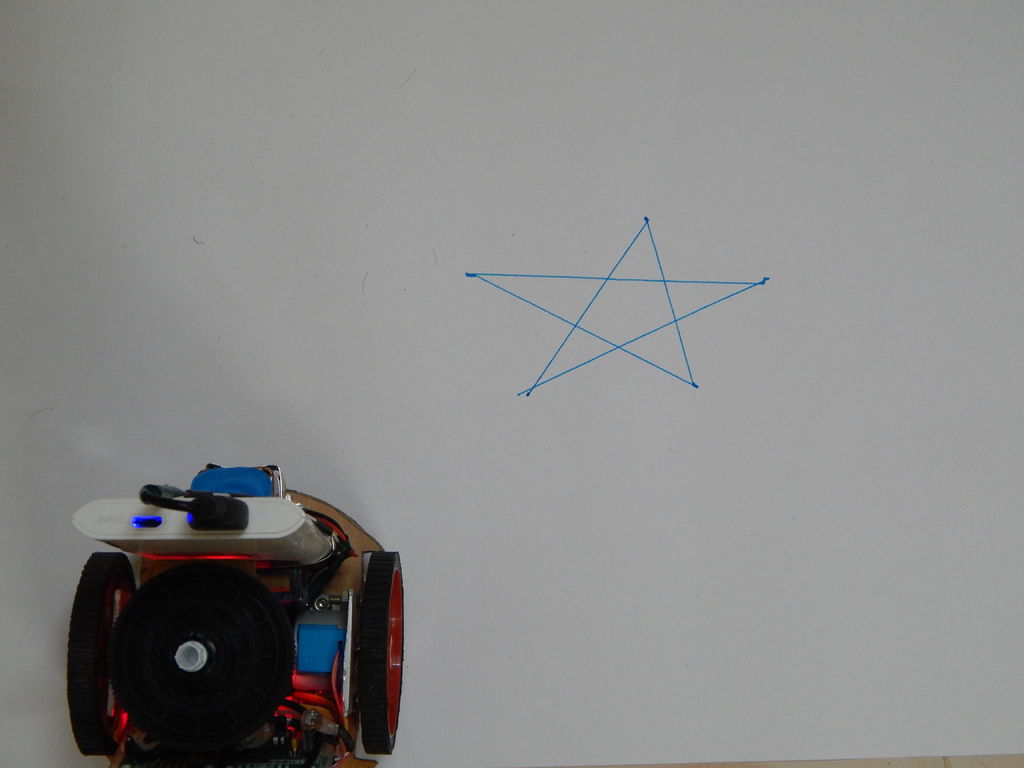

現在是時候看視頻了解它的工作原理。我們有很多不同的顏色草圖可以輕松地改變顏色并繪制您自己的圖紙,無需任何上傳。計劃在機器人中進行大量升級。
-
機器人
+關注
關注
213文章
29748瀏覽量
212930
發布評論請先 登錄
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發實踐
使用 Thonny 對 XRP 機器人進行編程






 工商網監
工商網監
評論